

盖世汽车讯 据外媒报道,美国麻省理工学院(MIT)和微软公司(Microsoft)研究人员研发出一个新颖的模型,可识别出自动驾驶系统从训练中学习到的,但与真实世界不匹配的实例。工程师们可利用该模型提升无人驾驶汽车、自主机器人等人工智能系统的安全。
例如,为无人驾驶汽车提供动力的人工智能(AI)系统,在虚拟仿真场景中得到广泛的训练,以便让车辆为路上几乎所有事件都做好准备。但是,有时,汽车在真实世界中会出现意想不到的错误,因为汽车应该根据发生的事件改变行为,但是自动驾驶汽车的行为并不会改变。
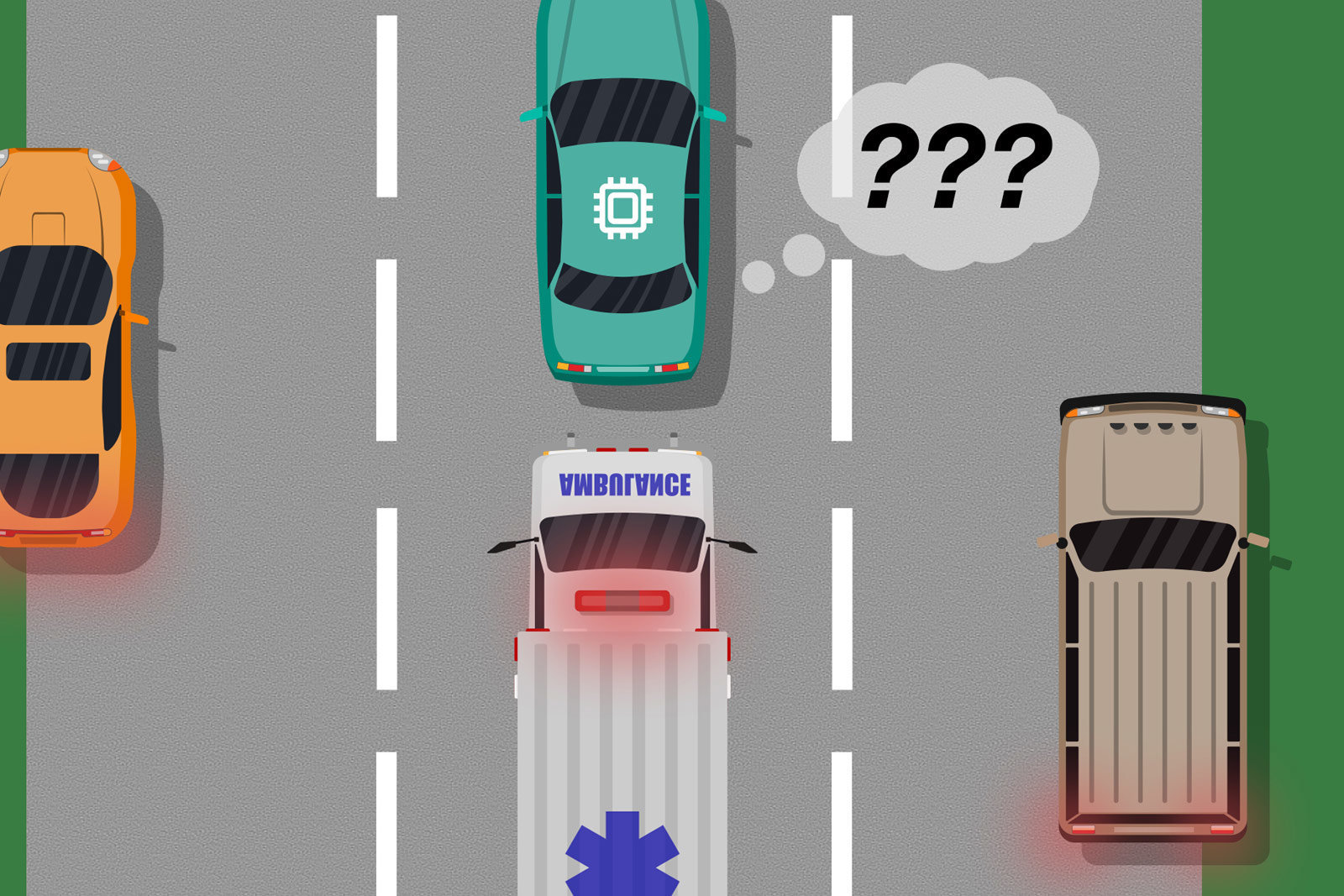
如果有一辆无人驾驶汽车没有经过训练,更重要的是没有配备可以区别不同场景的传感器,如区分路上的大型白车以及配备了红色闪光灯的救护车。如果该车在高速公路上行驶,同时有一辆救护车鸣笛,该车可能并不知道要减速并且靠边停下,因为它没有了解该救护车与一辆普遍大白车的区别。此类现象称为“盲点”。
有一些传统的训练方法确实在实际测试运行期间提供人工反馈,但属于更新系统的操作。此类方法不能识别“盲点”,而识别盲点对于在现实世界中进行更安全的操作非常有用。而研究人员的方法是,首先将人工智能系统置于仿真训练中,在仿真训练中,人工智能系统将产生一种“策略”,映射它在仿真训练中所能采取的最佳行动。然后,该系统将被部署到真实世界中,如果该系统在真实世界中的操作属于不可接受的范围时,人类会提供错误信号。
此外,该模型可以进行实时纠正。例如,如果人工智能系统在某个情境下做出了错误决定,人类驾驶员会控制该系统,并做出正确决策,从而将会教会该系统未来在相似情境下应该怎么做。
研究人员还研发出一种方法,可确保AI不会将某一特定反应的所有实例都标记为安全行为。为防止此种情况,机器学习算法将会判断可接受和不可接受的反应,同时使用概率算法查看模式,并决定正做出的决策是完全正确的,还是可能会产生问题的。
目前,该模型还未在现实世界中接受测试。但是研究人员一直在使用视频游戏对其进行测试,在该游戏中,有一位仿真人类会为游戏中人物的行为进行纠正。下一步,研究人员可能将该模型应用与真正的自动驾驶汽车及其测试系统。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/News/2019/01/290641334133I70086204C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














