戴姆勒计划在2020年之前开始销售自动驾驶车,作为重新回归最顶层豪华车制造商的战略内容之一。
目前,奔驰S500 INTELLIGENT DRIVE测试车已经从德国曼海姆市(Mannheim)出发,经过超过100公里的市郊及城市道路最终到达了德国另一所城市普福尔茨海姆(Pforzheim)。
测试中,奔驰S500测试车需要处理一系列复杂的路况,例如交通灯、环形交叉枢纽、行人与骑车人穿梭、有轨电车等。路试获得成功主要得益于奔驰的“接近量产水平的”最新自动驾驶技术,这些最新技术与全新奔驰E级和S级轿车上的相类似。
基于传感器(已经投入量产)进行自动驾驶
奔驰S 500 INTELLIGENT DRIVE测试车上搭载了已进行批产的传感器。基于奔驰新S级中已经投入实用的传感器技术,开发者对技术平台进行编程,“教”它识别当前位置、遇到特定情况该如何反应。借助“Route Pilot”的辅助,测试车能够以其自己的方式穿梭于密集的城市交通之间。
德国汽车工业协会(VDA)与德国联邦公路研究所(German Federal Highway Research Institute ,BASt)将自动驾驶划归为3个级别:部分自动化驾驶、高度自动化驾驶、全自动驾驶。
所谓部分自动化驾驶,就是司机必须时刻监视着自动驾驶功能,不得进行与驾驶无关的任何其他活动。
高度自动化驾驶则无需司机时刻紧盯系统,并且司机能够进行一部分特定的与驾驶无关的活动。系统自动对司机可使用的功能进行限制。
全自动驾驶中,系统有能力处理任何情况,司机无需在监视系统运作,可以在车中做任何想做的事。所谓的无人驾驶也就是达到这个程度。
部分自动化驾驶在全新奔驰E级和S级轿车中已经实现:车中配备带有转向辅助和拥堵跟车功能(Stop&Go Pilot)的增强型车距控制系统(DISTRONIC PLUS)。该系统能够自动控制汽车穿梭于拥堵路况之间。同时,增强型车距控制系统也是“梅赛德斯-奔驰智能驾驶(Mercedes-Benz Intelligent Drive)”的核心系统。
目前为止自动驾驶技术在成功路试的同时也面临着更大的挑战。例如,如何进一步提升汽车在交通灯、环形交叉枢纽、遇到突然窜出的行人及骑车者等复杂路况中行驶的安全性。
初步测试
“Route Pilot”的初步测试是在2012年初,由德国技术检验机构(German Technical Inspection Authority)支持。当时的测试基于奔驰E级与S级轿车中的技术平台,搭载了所有可用的主动及被动安全系统。
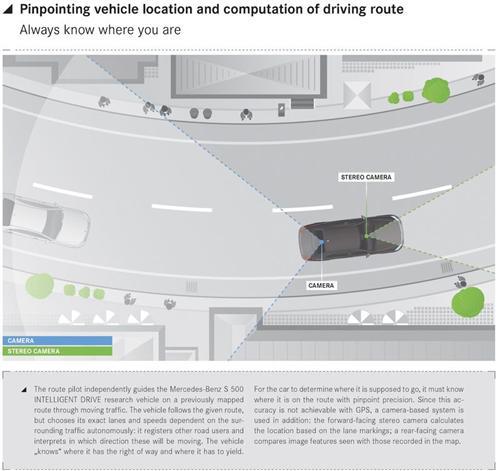
对比GPS信息与摄像头所收集图像对车辆位置进行精确定位
当时的测试车中配备的传感器目前已经大量运用于奔驰的量产车中。不过,这些传感器还需进一步改善以保证车辆的各个方向都能获得最完善的保护。
基于传感器数据并根据数字地图确定车辆的位置信息,自动驾驶车能够分析道路中的可行驶区域并自动规划路线。系统中的各项算法由奔驰研究团队与卡尔斯鲁厄理工学院共同开发。
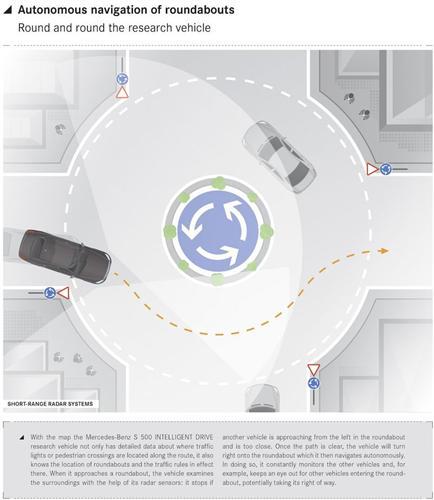
环形交叉枢纽处自动规划路线
新的技术相比标准量产版本的奔驰S级轿车在以下几方面有所改善:
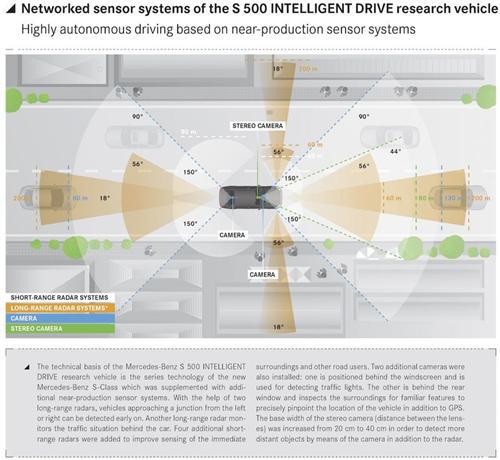
-立体摄像头的基础宽度(指摄像头两管的间距)增加,从而能够检测到更远距离外的车况。此前远距离车况是靠雷达传感器检测,而今后靠摄像头也能检测,达到了双重保险的作用。
-两个远程探测雷达装载于前保险杠两边,用于检测左右两边驶来的车辆。而后方则安装了一个探测距离更远的摄像头用以检测后方车况,防止追尾。
-汽车的4个角安装4个短程雷达,对车辆周围小范围内的道路环境进行更精确的检测。
-挡风玻璃后安装一个彩色摄像头,对交通信号灯进行监控,摄像头广角达到90°。
-另一个安装于后方的摄像头则负责观察车辆后方的环境特征。这些环境特征原本已经存储在电子地图中,而摄像头收集到车辆后方的景象并将其与存储在地图中的景象进行对比。这样一来,相比单用GPS定位要更精确。奔驰与卡尔斯鲁厄理工学院以及诺基亚旗下HERE部门进行合作,为此次的奔驰S500测试车专门建立一副从曼海姆到普福尔茨海姆路段的3D数字地图。
除了道路布局以外,这款3D数字地图包括交通路线和交通标志数量和方向信息,以及交通灯的位置信息,所有这些信息都必须满足极高的精确度。自动驾驶能否实现很大程度上取决于3D数字地图。奔驰与诺基亚HERE业务部也将长期合作,希望能够开发出更“智能”的3D数字地图。
Route Pilot在多样化路况中的应用
奔驰S500测试车中的Route Pilot导航需要处理各种不同的交通路况:环形交叉枢纽、高楼林立地区的障碍物、其他穿梭于路面的道路使用者、胡乱停放的路边车辆以及红灯。
在测试过程中,奔驰S测试车中坐着一位经验丰富的司机,一旦当车辆自驾系统做出不正确的判断时,司机能够立即夺回控制权。交通路况变化多端,不会有任何两个一模一样的场景发生。一旦测试车辆做出了不正确的决定,司机将会把它记录下来。
被记录下来的信息则提交给开发团队进行评估并解决。久而久之,该自动驾驶系统将能够处理越来越多的复杂路况,另技术平台更完善。此次进行的100公里路试为今后自动驾驶技术的开发奠定了强大基础。
戴姆勒公司表示,自动驾驶技术路试的成功之处在于让技术团队了解技术上存在的不足,并且明确了未来自动驾驶技术发展的主攻区域。包括根据实际环境发出的转向、加速和制动指令,例如在环形交叉枢纽中进行驾驶。下一步的挑战对车辆的位置精确定位,从而才能够决定车辆是否该进行制动。
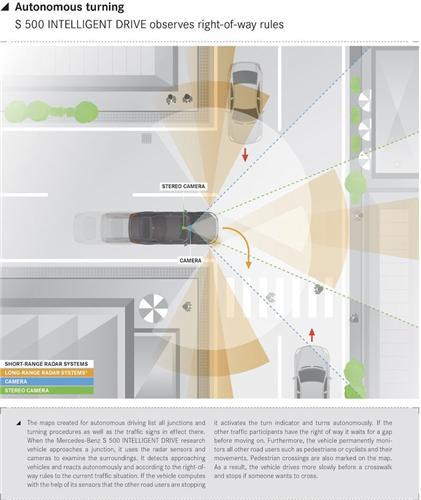
对于自动驾驶车来说,最大的挑战在于如何与其他道路使用者进行交互和通信。例如在一个十字路口进行大转弯时,与迎面的车辆进行通信,由车辆自行决定先让对方直行,还是先让己方转弯。
为了使开发者能够重建自动驾驶测试车在无人驾驶情况下所做的决策,汽车会记录所有传感器获得的数据。数码摄像头每小时产生300GB的数据量。即便以后自动驾驶车真正实现无人驾驶,传感器中的一些数据仍然会被储存。例如,一辆自动驾驶车发生了交通事故,摄像头将会把事故的过程记录下来,以便人们分析发生碰撞原因,并进一步优化其自动驾驶程序的算法。
(文章来源:盖世汽车网)
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/News/2013/10/19015529552960262131323.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921













