盖世汽车讯 据外媒报道,华南理工大学与清华大学研究人员开发出增强型激光雷达-惯性测量单元(LiDAR-IMU)SLAM框架,旨在提高自主模块化公交车停靠过程中的定位精度和鲁棒性。这一改进有助于提升自主模块化公交车系统的可靠性,从而支持更安全、更顺畅、更节能的下一代公共交通。
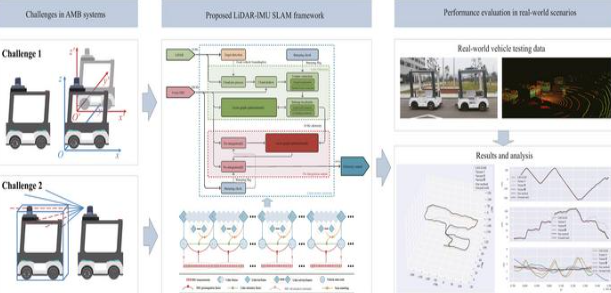
图片来源:《Green Energy and Intelligent Transportation》
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202604/20I70454383C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921