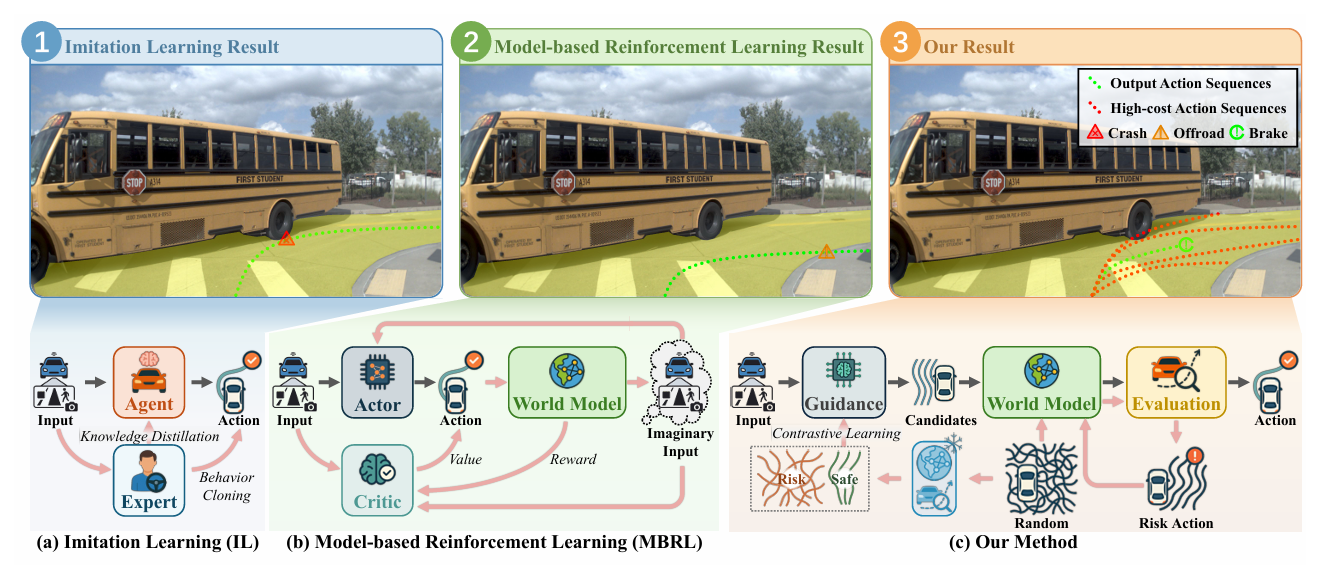
盖世汽车讯 随着模仿学习(IL)和大规模驾驶数据集的进步,端到端自动驾驶(E2E-AD)近年来取得了长足的进步。目前,基于模仿学习的方法已成为主流范式:模型依赖于专家提供的标准驾驶行为,并学习如何最小化自身行为与专家行为之间的差异。然而,这种“只像专家一样驾驶”的目标存在泛化能力有限的问题:当遇到专家示范分布之外的罕见或未曾见过的长尾场景时,由于缺乏先验经验,模型往往会做出不安全的决策。这就引出了一个根本性的问题:E2E-AD系统能否在没有任何专家行为监督的情况下做出可靠的决策?
据外媒报道,特伦托大学(University of Trento)和中山大学(Sun Yat-sen University)共同提出了一个名为风险感知世界模型预测控制(Risk-aware World Model Predictive Control,RaWMPC)的统一框架,旨在通过鲁棒控制解决这一泛化难题,而无需依赖专家示范。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202603/10I70449059C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921