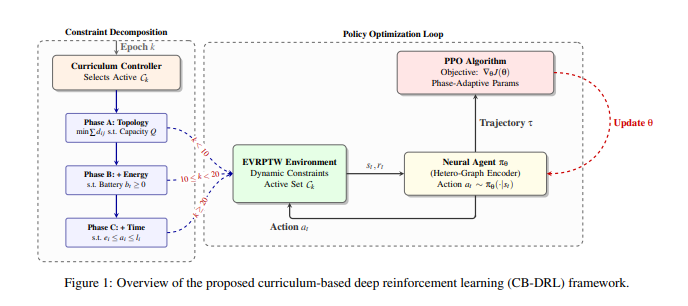
盖世汽车讯 据外媒报道,迈阿密大学(University of Miami))的Mertcan Daysalilar、塞浦路斯国际大学(Cyprus International University)的Fuat Uyguroglu、密苏里科技大学(Missouri University of Science and Technology)的Gabriel Nicolosi等研究人员提出了一种基于课程的深度强化学习框架,旨在提高电动车路径规划解决方案的速度和可靠性。
图片来源:https://arxiv.org/abs/2601.15038
现有的深度强化学习模型在面对此类问题的复杂约束时往往表现不佳,但这种新方法采用了一种分阶段学习系统,逐步增加难度,从而确保训练的稳定性和出色的泛化能力,即使在处理多达100个客户的问题时,也能保持良好的性能,而其训练样本规模要小得多。这一突破为在实际应用中实现实用、高效且可靠的电动车路径规划迈出了重要一步。
研究团队设计了一个结构化的三阶段课程,逐步增加问题的复杂性,使智能体能够先掌握距离和车队优化,然后是电池管理,最终掌握完整的电动车道路运输(EVRPTW)场景。这种分阶段的方法规避了通常困扰端到端深度强化学习(DRL)模型的稀疏奖励信号问题,从而促进了稳定的学习并防止策略崩溃。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202601/30I70445055C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921