盖世汽车讯 当机器人采用生物材料制造时,它们有可能实现通常只在自然界中才能看到的卓越行为。例如,与传统驱动器不同,由肌肉组织制成的驱动器能够适应环境并随着使用而变得更强壮。这意味着,由活体肌肉驱动的机器人不仅能够移动,还能锻炼身体,并随着时间的推移获得适应环境和更高效地执行任务的能力。为了将生物混合机器人应用于特定任务,研究人员首先必须了解如何设计和控制能够随着时间推移而变得更强壮的机器人。
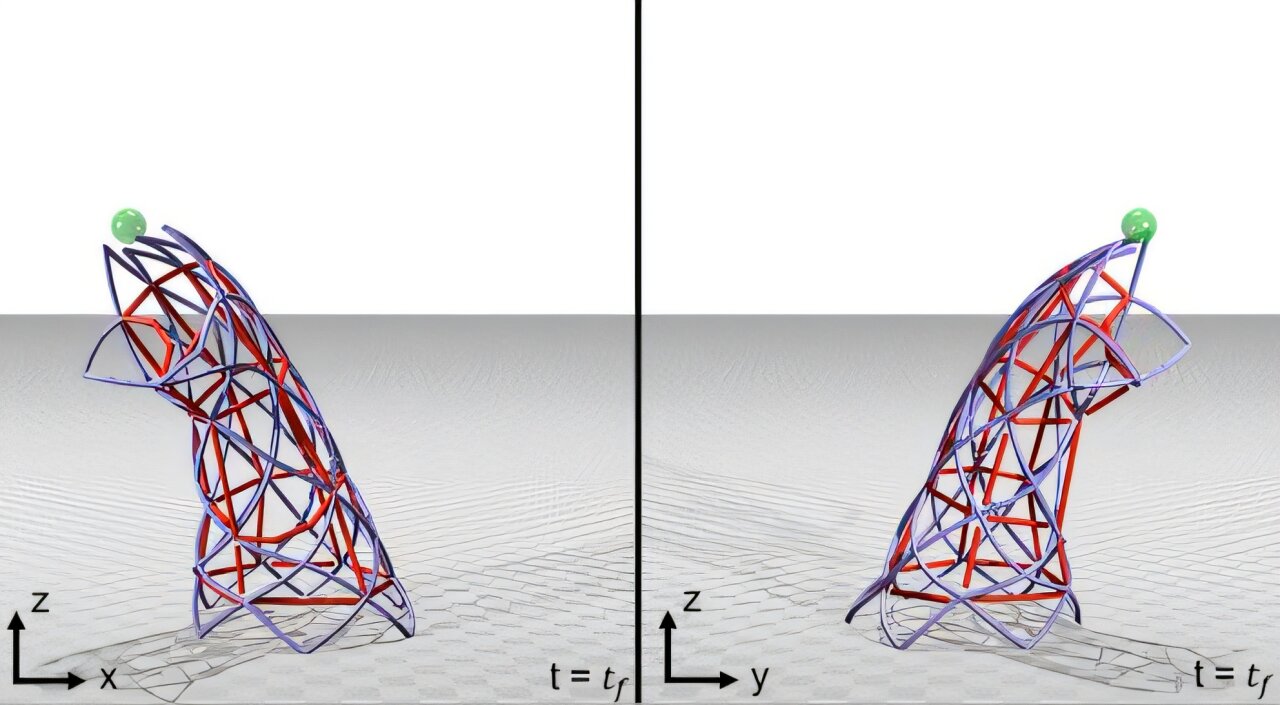
图片来源: 卡内基梅隆大学
据外媒报道,由卡内基梅隆大学(Carnegie Mellon University)机械工程系(Mechanical Engineering)副教授Vickie Webster-Wood领导的生物混合与有机机器人研究小组创建了一个模型来支持这一目标。通过强化学习,他们的方法能够学习控制生物混合机器人的模型,即使肌肉在每次尝试任务时都会变得更强壮。
为了验证这一点,研究人员设计了一个由42块活体肌肉组成的柔软蠕虫状机器人,并让它在模拟环境中向八个不同的目标移动。为了到达每个目标,机器人需要学习以不同的方式协调其肌肉。为了了解肌肉锻炼如何影响控制器学习到达目标的能力,研究团队分别模拟了肌肉静止和肌肉随着使用而增强的情况。
“在实验之初,我们曾质疑人工智能体是否会受到肌肉适应性的负面影响,”Webster-Wood说道,“然而,我们发现,拥有可适应的执行器完全没有阻碍学习。”
研究团队成功地教会了机器人如何通过协调肌肉收缩来向八个不同的目标移动,即使肌肉会随着时间推移而适应和变化。这些结果表明,肌肉的适应性帮助机器人更快地学习并更高效地执行任务。
“这使我们离设计和最终制造出能够像动物一样适应周围环境的生物混合机器人又近了一步,”Webster-Wood说道。

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202511/7I70436634C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921