盖世汽车讯 据外媒报道,由韩国大邱庆北科学技术院(DGIST)电气工程与计算机科学系(Department of Electrical Engineering and Computer Science)和物理人工智能中心的Kyung-Joon Park教授领导研究团队开发出一种新的“物理人工智能(Physical AI)”技术,通过对社会问题的传播和遗忘进行建模,提高了多机器人自主导航的效率。这项成果有望成为提升物流中心、大型仓库和智能工厂中自主移动机器人生产力的关键技术。
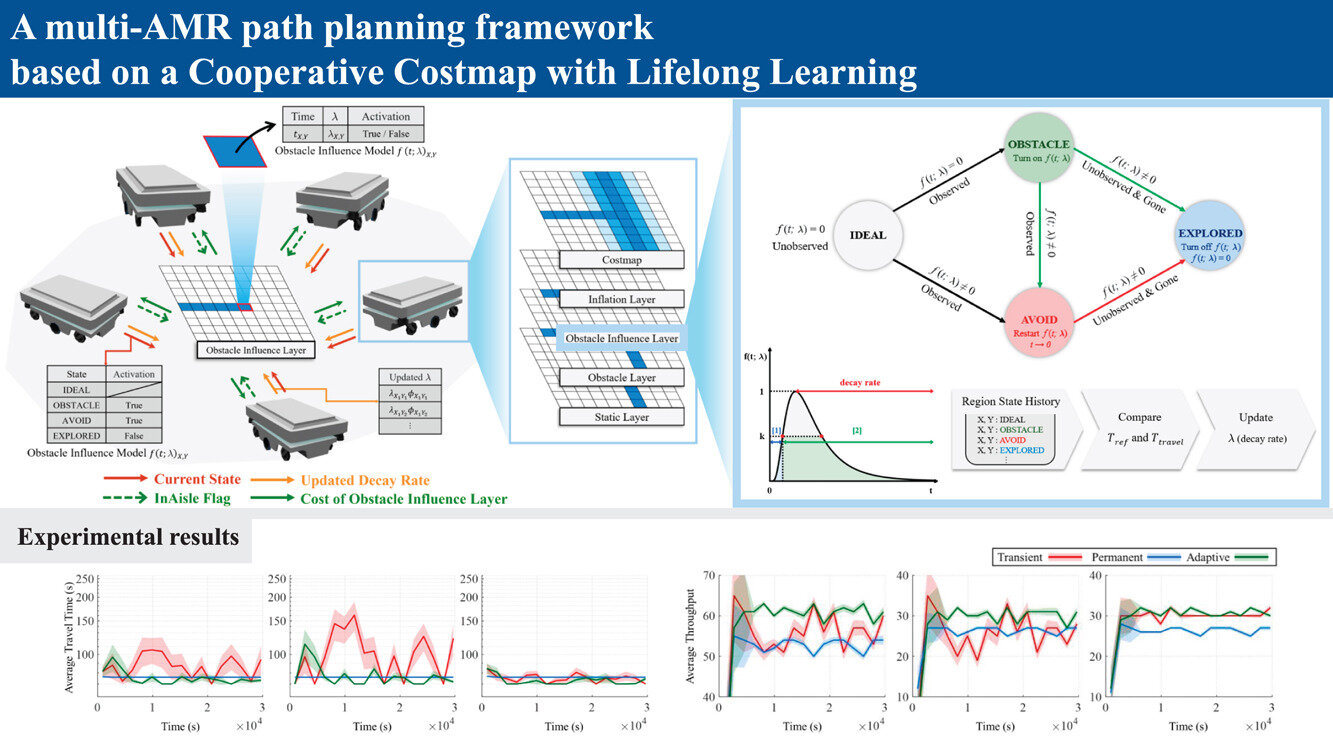
图片来源: 期刊《Journal of Industrial Information Integration》
相关研究论文发表在期刊《Journal of Industrial Information Integration》上。
自主移动机器人(AMR)在物流和制造现场的自动化中发挥着核心作用。然而,在实际操作中,诸如叉车、工作升降机或意外放置的货物等意外障碍物常常会扰乱机器人的平稳移动。迄今为止,机器人只能对突发情况做出反应并相应地调整路线,这会导致不必要的绕行和延误,最终导致生产力下降。
为了应对这一挑战,Kyung-Joon Park教授的团队将人类社会中一种独特的现象应用于机器人。他们关注某些事件或问题如何迅速传播,然后逐渐被遗忘。团队对这一过程进行了数学建模,并将其融入机器人的集体智能算法中。结果,机器人能够自然地忘记不必要的信息,立即只分享重要的细节,并实现更高效的协作导航。
在实际实验中,研究团队使用了模拟物流中心环境的“Gazebo模拟器”。结果表明,与传统的ROS 2导航相比,这项新技术将任务吞吐量提高了高达18.0%,平均驾驶时间缩短了高达30.1%。这表明机器人不再仅仅是躲避障碍物的机器;它们正在进化成为能够理解社会规律并自主运行的物理人工智能系统。
该技术的另一大优势在于其易于应用。它仅使用二维激光雷达即可实现,无需额外传感器,并且已开发为与ROS 2导航堆栈兼容的插件。这意味着它可以直接应用于现有的自主导航系统,无需复杂的设备,从而能够在无人机集群、自动驾驶汽车和物流机器人等工业环境中快速部署。尤其值得一提的是,它有望在智慧城市交通管理以及大规模勘探和救援行动中,在协作式自主导航系统中发挥重要作用。
Kyung-Joon Park教授表示:“我们模仿了社会原则,即忘记不必要的信息,只保留重要信息,从而实现高效的移动。这项研究意义重大,因为它展示了物理人工智能如何演化以模仿人类行为。”

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202510/9I70434840C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921