盖世汽车讯 据外媒报道,韩国蔚山科学技术院(UNIST)人工智能(AI)研究生院的Kyungdon Joo教授及其研究团队宣布开发出新颖的人工智能框架VPOcc,利用消失点在像素和特征层面上缓解2D-3D差异,旨在使基于摄像头的自动驾驶汽车能够更准确地感知周围环境。该方法解决了摄像头输入固有的透视失真问题,从而能够更精确地理解场景。
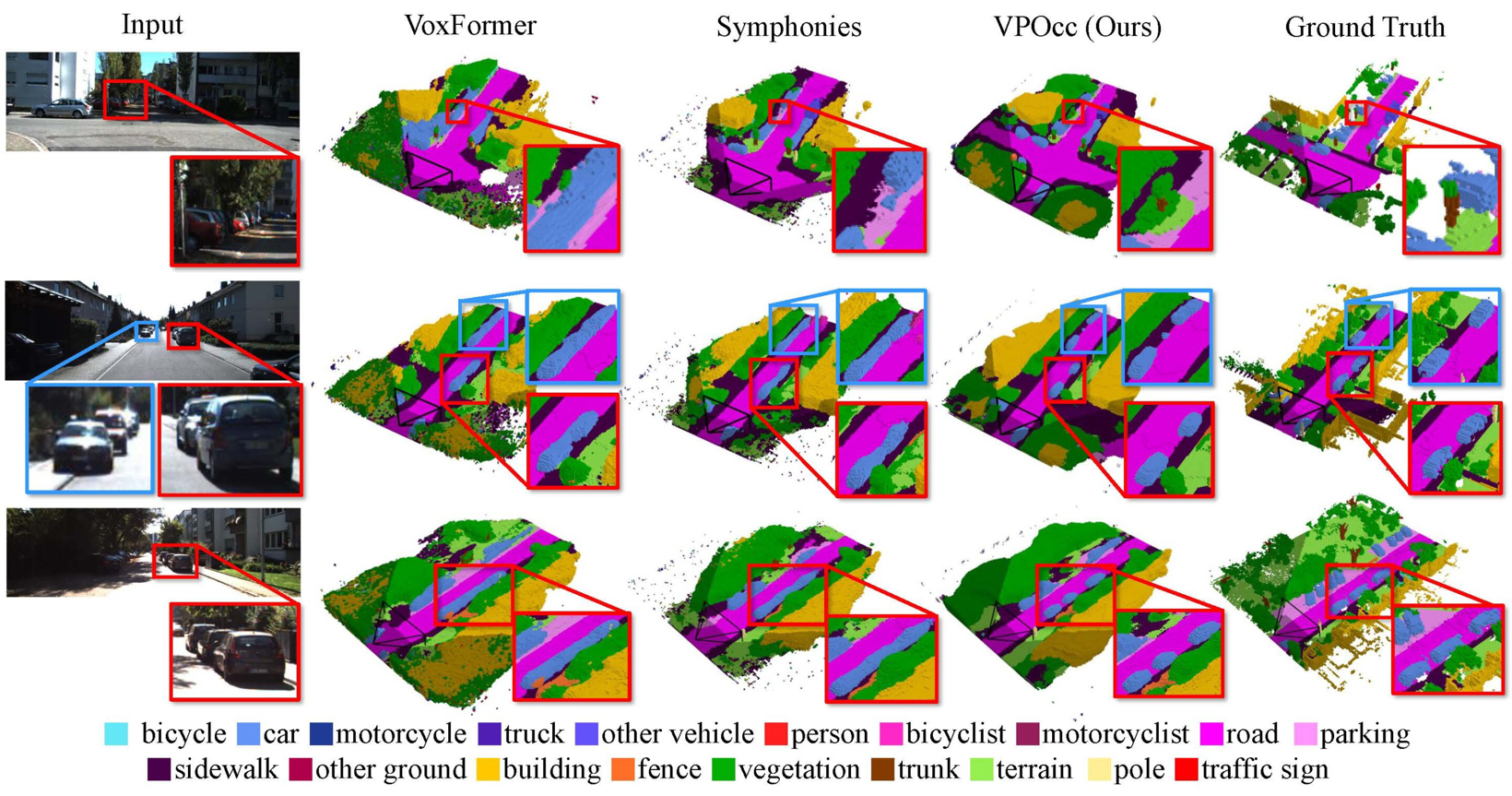
图片来源: UNIST
这项创新方法利用了消失点的几何概念——一种在图像中传达深度和透视的艺术手法。
自动驾驶汽车和机器人主要通过摄像头和激光雷达传感器识别周围环境。虽然摄像头比激光雷达更经济实惠、重量更轻,并且能够捕捉丰富的色彩和形状信息,但由于将三维空间投影到二维图像上,也带来了一些严重的问题。靠近摄像头的物体看起来更大,而远处的物体看起来更小,这会导致潜在的错误,例如漏检远处的物体或过分强调附近区域。
为了应对这一挑战,研究团队设计了一个基于消失点(文艺复兴时期画家为描绘深度和透视而提出的一个概念,平行线似乎会汇聚在远处的一点)来重建场景信息的人工智能系统。正如人类通过识别平面画布上的消失点来感知深度一样,开发的人工智能模型也利用这一原理更准确地恢复了摄像机镜头中的深度和空间关系。
VPOcc模型由三个关键模块组成。第一个是VPZoomer,它通过基于消失点扭曲图像来校正透视畸变。第二个是VP引导的交叉注意力(VPCA),它通过透视感知的特征聚合从近处和远处区域提取平衡的信息。第三个是特殊的体积融合(SVF),它融合原始图像和校正后的图像,以互补彼此的优缺点。
实验结果表明,VPOcc在空间理解(以平均并集(mIoU)衡量)和场景重建精度(IoU)方面均优于多个基准测试中的现有模型。值得注意的是,它可以更有效地预测远处物体并区分重叠实体——这些能力对于在复杂道路环境中进行自动驾驶至关重要。
这项研究由第一作者、UNIST研究员Junsu Kim领导,UNIST的Junhee Lee和美国卡内基梅隆大学(Carnegie Mellon University)的团队也参与了研究。
Junsu Kim 解释说:“将人类的空间感知融入人工智能,可以更有效地理解3D空间。我们的重点是通过解决摄像头传感器固有的视角限制,最大限度地发挥其潜力——它比激光雷达更经济、更轻便。”
Joo教授补充道:“这项开发的技术应用范围广泛,不仅涵盖机器人和自主系统,还涵盖增强现实(AR)地图等领域。”

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202510/29I70436019C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921