一、组织架构与技术架构的动态关联:从主导依附到逻辑重构
在汽车行业的架构演进过程中,组织架构与技术架构的关系始终是核心议题,而集中化架构的兴起不仅带来了技术层面的变革,更对行业认知提出了全新挑战。深入探究二者的内在联系及集中化架构的关键维度,对于理解智能汽车的发展逻辑具有重要意义。
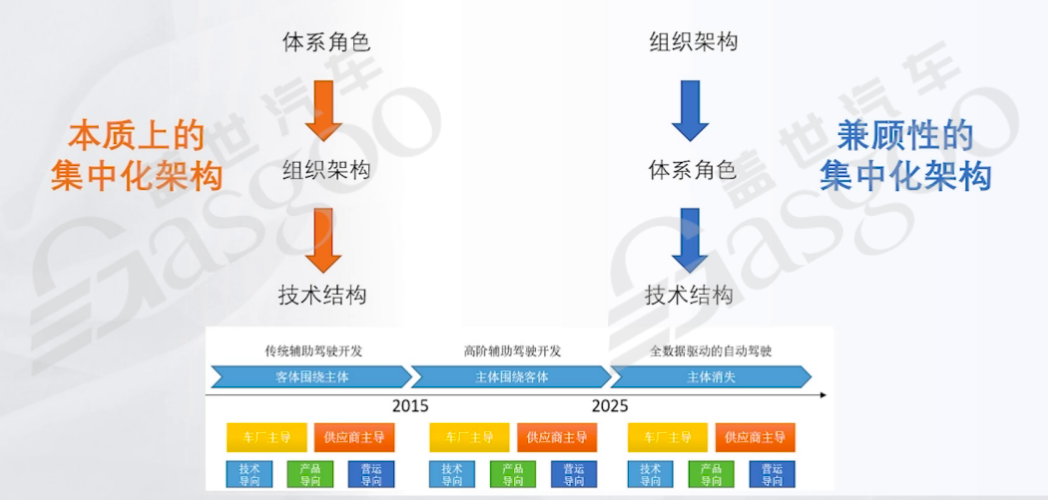
组织架构与技术架构之间存在着复杂而动态的关系,这种关系在不同的发展阶段呈现出不同的特征。在传统辅助驾驶开发阶段,组织架构往往占据主导地位,决定着体系角色的划分,进而影响技术架构的形态。例如,当企业设立支架中心与支撑中心时,体系角色会相应地分为支架与支仓,技术架构也会随之形成支架与控制器、支仓与控制器的对应结构。这种模式下,组织架构如同骨架,技术架构则是依附于骨架生长的血肉,组织的分工直接塑造了技术的实现路径。
国内企业在集中化架构的探索中,多采用兼顾性的模式,组织架构对技术架构的影响尤为显著。这种兼顾性体现在企业试图在现有组织框架内推进技术的集中化,导致技术架构不可避免地带有组织分工的烙印。然而,特斯拉的架构给人带来了不同的启示。尽管其具体组织架构因保密措施而难以窥探,但从其架构表现来看,体系角色似乎优先于组织架构。即先根据产品本身的功能需求,明确各部分的合理归属(即体系角色),再以此为基础构建组织架构和技术架构。这种模式下,技术架构的形成更贴近产品的本质需求,组织架构则是为了支撑这种技术逻辑而存在,展现出更强的统筹性。

这种统筹性并非源于技术的绝对领先,而更多体现在组织结构的规划能力上。实际上,国内企业在硬件制造能力上并不逊色,例如完全有能力造出集中化架构的控制器,但在角色优先性的认知和实践上存在差距。当多个组织参与项目时,为了维护系统的稳定性,往往需要牺牲部分产品性能,这是多组织架构下难以避免的妥协。而若要实现以技术架构为优先,企业需要打破组织壁垒,以技术逻辑重构组织分工,这对国内企业而言是极大的挑战。
软件领域同样存在组织架构决定软件架构的现象。软件供应商的组织架构会影响其软件架构的设计,导致不同组织开发的软件模块在整合时出现兼容性问题。要实现软件架构的优化,同样需要突破组织架构的束缚,以技术需求为导向进行统筹规划,但这需要企业具备强大的组织协调能力和长远的技术视野。
二、域控架构的特征解析:组织、技术与形态发展
域控架构是当前汽车电子架构的重要形态,其形成与发展深受组织架构、技术需求和行业生态的影响。从组织架构角度来看,域控架构的研发稳定性受制于COC的能力,不同的成本中心会基于自身利益推进域控产品的开发,导致供应商更倾向于推出体系内的域控产品,这在一定程度上限制了域控架构的跨域整合。
尽管不同域控制器在硬件上的差异较小,理论上软件可以实现迁移,但实际操作中却面临巨大的认知负载障碍。认知负载源于工程师对不同域控制器的开发逻辑、接口标准和功能需求的熟悉程度,这种熟悉程度的差异使得软件迁移需要投入大量的时间和精力进行适配,实际可行性较低。当前的域控设计大多是面向车厂现有能力构建的,即根据车厂现有的技术储备、组织分工和供应链体系来确定域控制器的功能和结构,而非完全基于理想的技术逻辑。
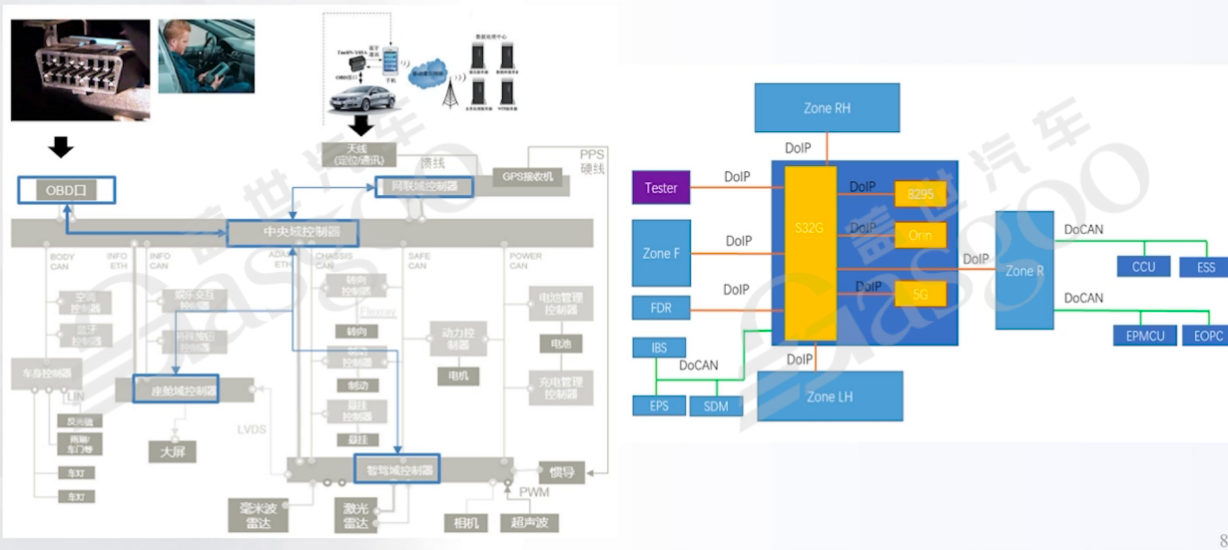
具体来看,常见的域控制器包括车身域控制器、中央域控制器、智舱控制器、辅助驾驶控制器和底盘域控制器等,它们的形成都与特定的功能需求和组织分工密切相关。车身域控制器的出现与车身传感器分布分散的特点有关,需要一个集中的控制器来协调众多传感器的数据和执行器的动作;中央域控制器由原网关控制器部门发展而来,继承了网关在数据转发和协议转换方面的功能,并在此基础上扩展了更多的中央控制能力;智舱和辅助驾驶控制器则是由于其功能的复杂性不断提升,从最初的MCU升级为MPU,以满足更高的计算需求。
底盘域控制器是近年来逐渐兴起的整合产物,它将线控刹车、线控转向、动力系统等原本独立的控制部分整合在一起,以提高底盘控制的协调性和响应速度。这些域控制器大多属于独立的COC,在功能上存在一定的交互服务。例如,360度环视功能涉及智舱和辅助驾驶的交互,人机共驾场景下需要智舱与辅助驾驶控制器协同工作,这些交互是域控架构发展中需要重点处理的问题。
从硬件结构来看,不同域控制器的差异并不显著,多采用MCU搭配MPU的模式,仅在外围IO上可能存在些许不同。但特斯拉的域控架构却展现出独特性,其左中右前控制器采用高性能计算单元搭配多IO控制器的设计,能够处理部分降级业务。这种命名方式并非基于功能划分,而是体现了标准化和集中化的思路,其PCB板采用机翼型设计,以适应整车的空间布局,最大化利用车内空间,这也使得特斯拉在车内储物空间设计上具有优势。
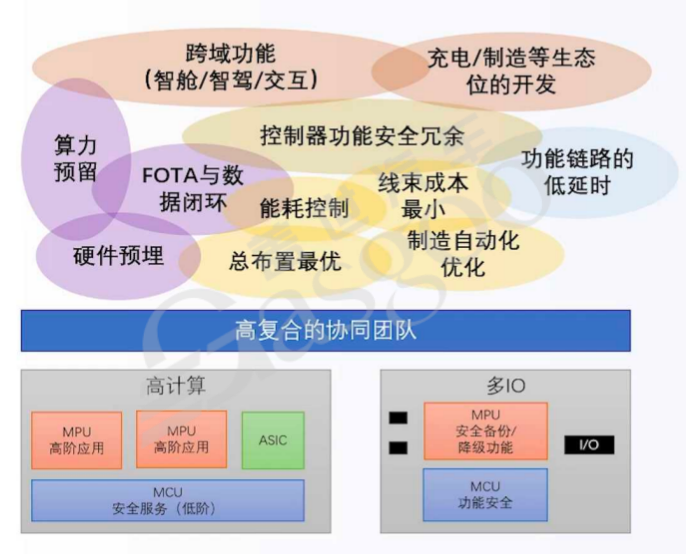
特斯拉的域控架构更注重全局优化,如线束成本最小化、总布置最优化、算力预留等,功能的表现形式不再是首要考量因素。这种设计思路需要企业具备跨域的协同能力和长远的成本意识,而这往往需要打破传统的组织壁垒和利益格局。例如,跨域集成和Zonal集成需要各部门放弃部分原有利益,对于独立的成本中心或不同公司而言,这种整合面临巨大的阻力,相对弱势的一方往往会极力维护自身利益,阻碍整合进程。
三、车企架构演进路径:传统与新势力的差异化选择
传统车企与新势力车企在架构选择上呈现出明显的差异,这种差异源于其组织架构、产品定位和技术储备的不同。传统车企由于历史积淀,组织架构相对层级化,产品系列丰富,需要考虑不同配置车型的架构兼容性和EE架构裁剪的成本,因此在向跨域融合的中央集成式EE架构转型时,面临着组织架构扁平化的巨大挑战。
为了应对这种挑战,传统车企多采取渐进式的演进策略。研发能力较弱的传统车企,短期内会继续采用分布式ECU加部分域控的准域控EE架构,逐步向部分域融合的准中央集成EE架构过渡;研发能力较强的传统车企,则会自主开发核心域,其他域采用Tier1的成熟平台,通过跨域融合逐步实现准中央集成,例如将车身域与动力域融合、座舱域与L2辅助驾驶域融合,而高阶辅助驾驶作为选配单独设置域控制器。
新势力车企则凭借天生的扁平化组织架构和单一的产品定位,在架构选择上更为激进。它们无需过多考虑EE架构的可裁剪性,且自身软件开发能力较强,更倾向于快速迭代到中央集成式EE架构。研发能力较弱的新势力,会在较长时间内采用大部分域控加小部分ECU的准域控EE架构;研发能力较强的新势力,则已开始量产部分域融合的准中央集成EE架构),并计划未来迭代到跨域融合的中央集成EE架构,最终实现舱驾融合SoC加车控MCU的中央计算平台。
无论是传统车企还是新势力车企,其架构演进都遵循着从分布式到域控,再到准中央集成和中央集成的基本趋势。分布式架构以硬件合作为主,软件占比低,OEM与供应商各拥有50%的话语权,使用Autosar整套工具链,存在ECU数量多、成本高、通信负载率高、迭代速度慢等问题。
域控架构下,OEM和关键解决方案提供商掌握70%的话语权,传统Tier1的硬件销售逻辑逐渐失效,部分小型控制器被整合,软件工具链开始混用汽车软件与互联网软件,ECU融合有限,成本仍较高,但软件集成度和迭代速度有所提升。
准中央集成架构根据功能属性融合域控制器,形态多样,域控之间可互为冗余,ECU数量大幅减少,成本和重量降低,线束长度缩短,服务化比例显著提升,逐步实现整车区域化,IO就近接入,区域配电和通信管理得到优化。
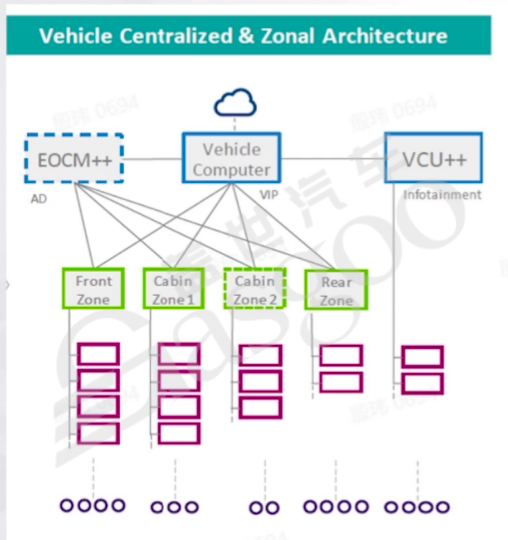
中央集成架构将实现智能传感器、执行器与高可靠性的结合,采用车内无线通信技术和新总线技术(如TSN/DDS),高带宽、高可靠性的车云链路成为可能,云计算、边缘计算与中央计算协同工作,车内和云端架构无缝衔接,车端计算负责实时处理,云端计算作为补充,为智能汽车提供非实时的数据交互和运算处理,软件聚焦中央计算平台,迭代速度大幅提升。
四、集中化架构的认知挑战与关键维度突破
集中化架构的推行不仅是技术层面的变革,更对行业认知提出了全新挑战,其关键维度涉及话语权分配、功能职责划分、协同机制建立等多个方面。从本质上看,架构的分解更多是话语权和认知的体现,而非单纯的技术问题。不同企业的架构差异,很大程度上与组织架构相关,但技术层面仍需明确架构的核心职责。
诊断功能的分层设计是集中化架构中的重要认知维度。诊断系统具有明显的层次性,不同层面的诊断需求差异显著,需要与数据闭环协同设计。底层诊断主要针对整车基础数据,采用全量性的长周期采集模式,数据量相对较少,周期一般在一秒左右;上层业务系统的诊断则涉及复杂逻辑,数据带宽量大,采用触发式采集,周期可达到100毫秒左右。若用下层诊断逻辑处理上层业务,会导致带宽不足等问题,因此必须坚持分层设计原则,避免不同层级的逻辑相互干扰。
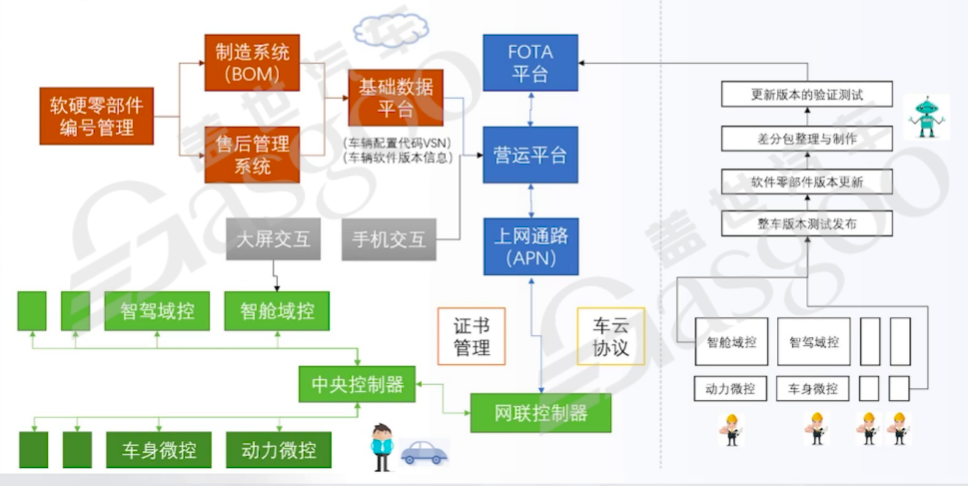
OTA的分级架构设计同样面临认知挑战。OTA系统是一个层次结构,需要注重高内聚、低耦合,伴随SOTA类应用,云端工具链也需解耦。传统的整车OTA针对大版本更新,但存在控制器内MCU和MPU分开更新的问题,导致业务与整车流程耦合,影响迭代效率。更优的设计是由控制器的MPU更新MCU,实现同一业务OTA过程的内聚,便于研发阶段的独立OTA和自动化部署,减少对整车流程的依赖。这需要支架COC与EE架构部门密切配合,同时还要考虑OTA内部的AB面设计、auto loader设计等细节问题。
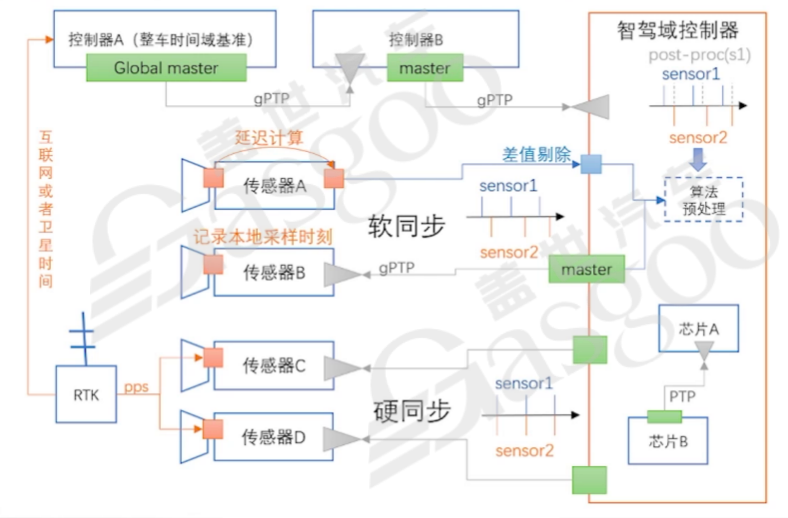
时间同步是集中化架构中另一个关键的认知维度,对辅助驾驶领域尤为重要。不同传感器的数据到达控制器的时间存在差异,若不进行同步,会因控制器时钟的不准确性导致数据时间错位,影响辅助驾驶决策。通常以车控主芯片作为global master,基于卫星时间同步,再通过gPTP与其他域同步。但从智能汽车整体角度看,辅助驾驶控制器对时间敏感性最高,以其作为时间同步节点可缩短同步链路,提高可靠性,而目前多由网联控制器作为master,存在历史遗留的认知惯性问题。
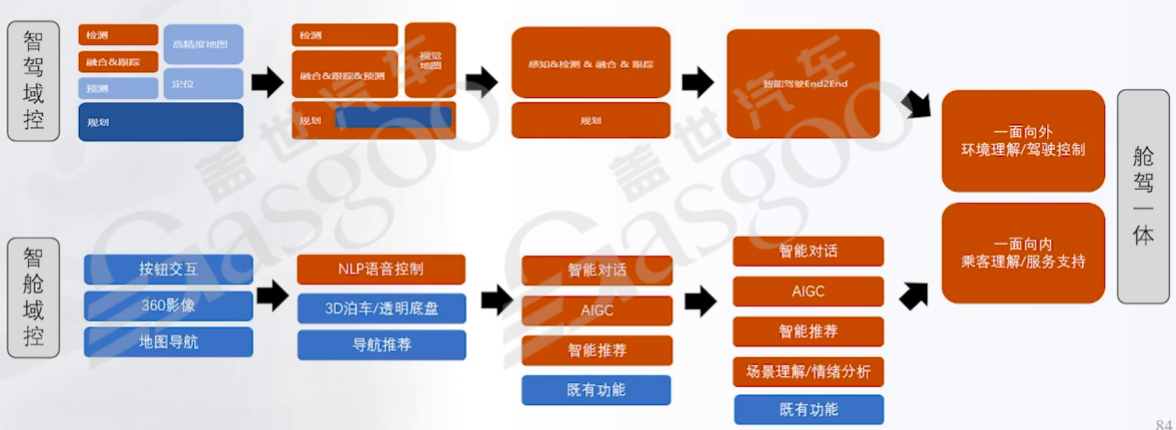
算力分配与负载均衡是集中化架构面临的核心认知挑战。随着辅助驾驶和智舱领域模型化程度的提高,两者的业务存在融合可能,如感知数据共享、模型复用等,这需要对算力进行合理评估和分配。在未完成大规模模型化前,不建议将智舱和辅助驾驶业务整合,低阶功能的整合相对可行。算力评估需基于实测,考虑不同工况下的负载波动,如32个锥桶场景下的感知处理、筛选器和OTA的触发式高负载、地图规划的峰值算力需求等,并设置饱和策略控制负载影响范围。
芯片设计与业务应用的协同也是集中化架构中的重要认知维度。芯片企业通过开展辅助驾驶业务,并非主要为了销售产品,而是为了评估芯片设计的合理性,例如内存配置、ASIC占比等,以降低流片成本。这种以业务应用反推芯片设计的思路,要求企业打破技术与业务的壁垒,建立紧密的协同机制。
此外,启动时间和低功耗模式的功能分解也对集中化架构的认知提出要求。高敏感启动时间的功能和高耗电功能,需要在控制器架构与软件架构、EE架构及系统层面进行针对性设计,考虑MCU/MPU的功能落地、算法选择、通信链路、冗余设计等因素,以确保功能的稳定性和高效性。
集中化架构的推进需要行业打破传统认知,从全局优化的角度重新审视组织架构与技术架构的关系,明确各关键维度的设计原则,建立适应集中化趋势的协同机制,才能充分发挥集中化架构在成本控制、迭代效率、功能整合等方面的优势,推动智能汽车技术的持续发展。
本文地址:https://auto.gasgoo.com/news/202507/12I70428904C106.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921