一、整车开发思维与互联网开发思维的核心差异
(一)两种开发思维的本质特征
汽车产业正经历从传统机械产品向智能软硬件结合产品的转型,这一过程中,整车开发思维与互联网开发思维的碰撞尤为显著。两种思维看似对立,实则均以风险规避为核心目标,只是应对风险的路径截然不同。
整车开发思维以硬件为核心载体,硬件的物理属性决定了其变更成本极高——从设计调整到生产线改造,每一次改动都需投入巨额资金和时间。因此,整车开发流程通常仅包含3-4次迭代,且高度依赖严密的预防措施降低风险。其开发模式遵循V模型,重视流程与文档体系建设,强调职权分离和保守思维,所有决策都服务于长周期的硬件生命周期。
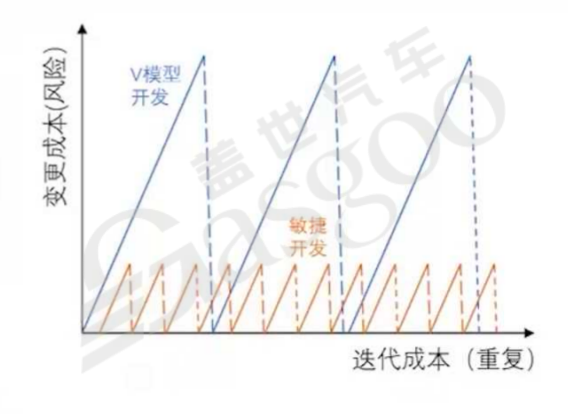
互联网开发思维则以软件为核心,软件的虚拟性使其变更风险较低,但迭代频率极高。为适应这种高频迭代,互联网思维将核心目标定为降低单次迭代成本,采用敏捷开发模式,重视可扩展性和数据管道搭建,以职权统一和激进思维为主导,聚焦于短周期的软件更新需求。SOA作为互联网思维的产物,通过拆分功能模块、减小变更影响范围,进一步压缩迭代成本。
值得注意的是,两种思维并非绝对割裂。汽车作为软硬结合的综合体,其高质量开发必须以坚实的基础建设和跨域复合型人才为支撑。缺乏这两个要素,盲目套用互联网思维可能导致风险失控,而固守传统整车思维则会丧失产品竞争力。
(二)开发逻辑与工具链的冲突表现
在开发逻辑层面,整车思维依赖因果关系推导,任何功能安全认证、需求设计都需经过严格的逻辑链验证,例如“吸烟导致肺炎”的明确因果关联,这种模式虽确保了可靠性,但牺牲了敏捷性。互联网思维则基于相关性分析,网络模型通过训练学习要素间的关联关系,只要最终效果达标,无需深究中间逻辑,这种模式虽提升了迭代速度,却降低了可解释性。
当前行业呈现相互融合的趋势,传统车企开始弱化部分文档要求以加速交付,互联网企业则加强流程建设以提升可靠性。但这种融合并未消除本质差异,例如仿真软件领域,整车厂主导的工具强调行业标准统一,互联网企业则采用自建标准确保链路自洽,导致测试环节因地图格式、协议不兼容出现矛盾——测试部门用开源地图验证,开发部门却采用自研格式,双方难以确认测试结果的一致性。
工具链的差异同样显著。整车厂注重单个环节的标准化,如高精度地图的互换标准,但忽视车云链路中相邻模块的协同自动化;互联网企业则追求全链路自洽,从数据采集到模型训练采用统一标准,却拒绝遵循行业通用规范。这种差异导致MBD(模型驱动开发)与CBD(代码驱动开发)工程师难以协作,操作系统、开发语言、依赖库等均存在壁垒,增加了跨团队沟通成本。
二、功能安全与功能实现的解耦路径
(一)系统分离的核心原则
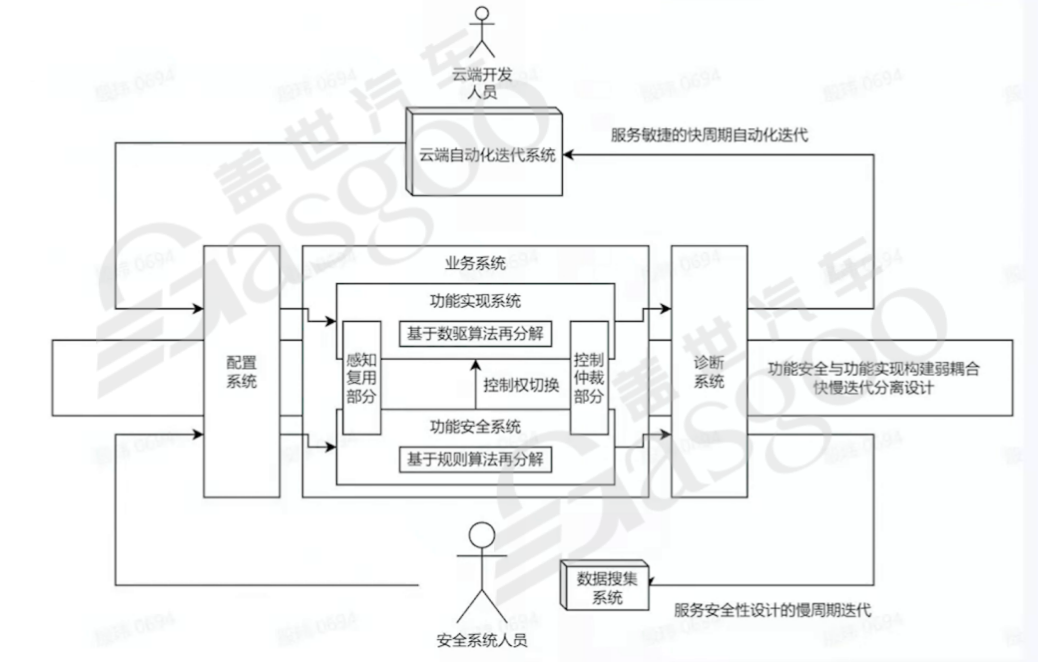
功能迭代与功能安全的矛盾,本质是功能实现系统与功能安全系统的耦合过度。解决这一矛盾的首要原则是,功能安全系统不参与主功能实现,两者需构建弱耦合关系。
功能安全系统的核心职责是控制风险下限,例如障碍物识别后的紧急制动、车辆失控时的稳定性干预等,其目标是确保车辆不发生灾难性事故。这类系统适合采用规则算法,依赖明确的逻辑判断,且需通过严格的功能安全认证(如ISO 26262),迭代周期长但稳定性要求极高。
功能实现系统则聚焦用户体验提升,如自动泊车的平顺性优化、车道保持的精准度调整等,其目标是增强产品竞争力。这类系统适合采用数据驱动的网络模型,通过高频迭代持续优化,对可解释性要求较低,但需具备快速响应市场需求的能力。
以华为的“一票否决”机制为例:功能实现团队(中层和底层)负责提出创新方案,功能安全团队(领导层)仅负责否决风险方案,不干预具体实现。这种模式既保证了功能迭代的敏捷性,又守住了安全底线。在汽车开发中,类似逻辑体现为:规划算法可尝试激进路径以提升体验,控制系统则始终保持保守,在检测到风险时立即接管车辆。
(二)差异筛选与协同机制
功能安全边界不仅是安全保障的红线,更是功能迭代的“校准器”。当功能实现系统与功能安全系统出现决策差异时,这些差异点是极具价值的数据资源,可作为优化迭代的重要依据。
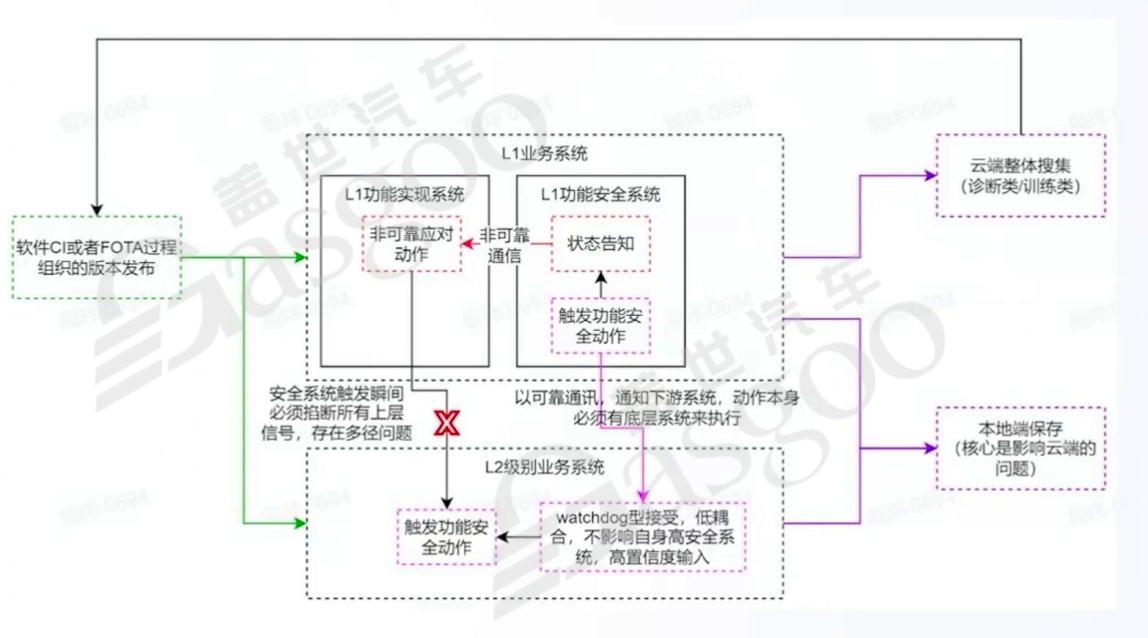
例如,功能实现系统规划的行驶路径与功能安全系统判定的安全边界冲突时,该场景需被自动记录并上传至云端。通过分析这类差异数据,开发团队可定位功能实现算法的缺陷,如感知误差、预测偏差等,进而针对性优化模型。这种机制使安全系统与实现系统从“相互制约”转变为“相互赋能”。
为实现这一协同,车云一体架构需设计专用的数据搜集系统:本地端实时记录两者的决策信号,通过可靠通信上传至云端;云端自动化迭代系统对数据进行清洗、标注,生成训练样本;功能实现系统基于新样本完成模型更新后,再通过FOTA(固件在线升级)推送至车端。同时,功能安全系统保持独立迭代,仅在底层与实现系统进行必要的信号交互,确保控制权切换的安全性。
三、车云一体架构的技术支撑体系
(一)软硬件一体设计的底层逻辑
车端底层的软硬件一体设计是平衡功能迭代与功能安全的基础,其复杂性堪比淮海战役中的人桥——业务需求与硬件约束相互制约,需通过联合设计实现全局最优。
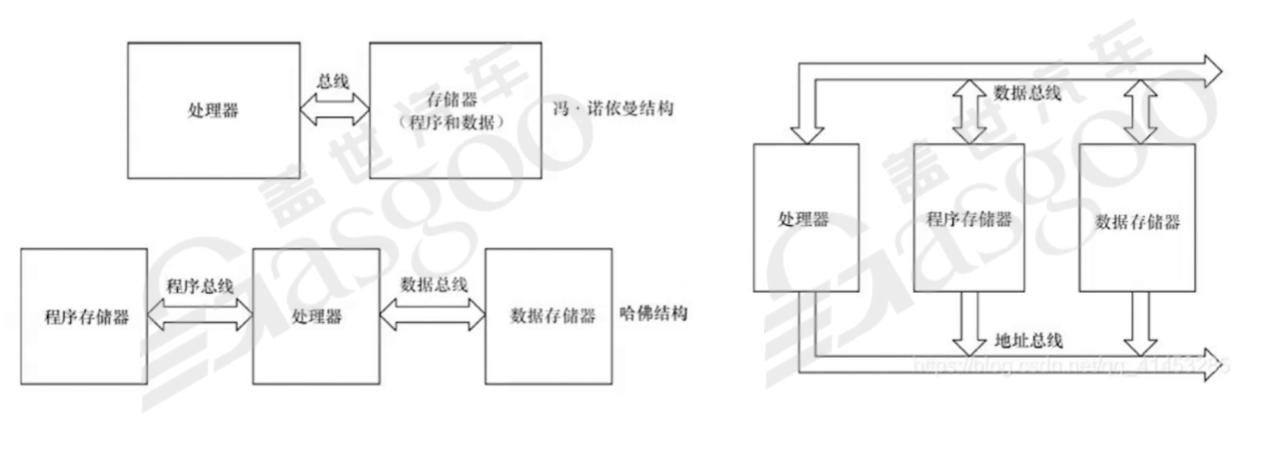
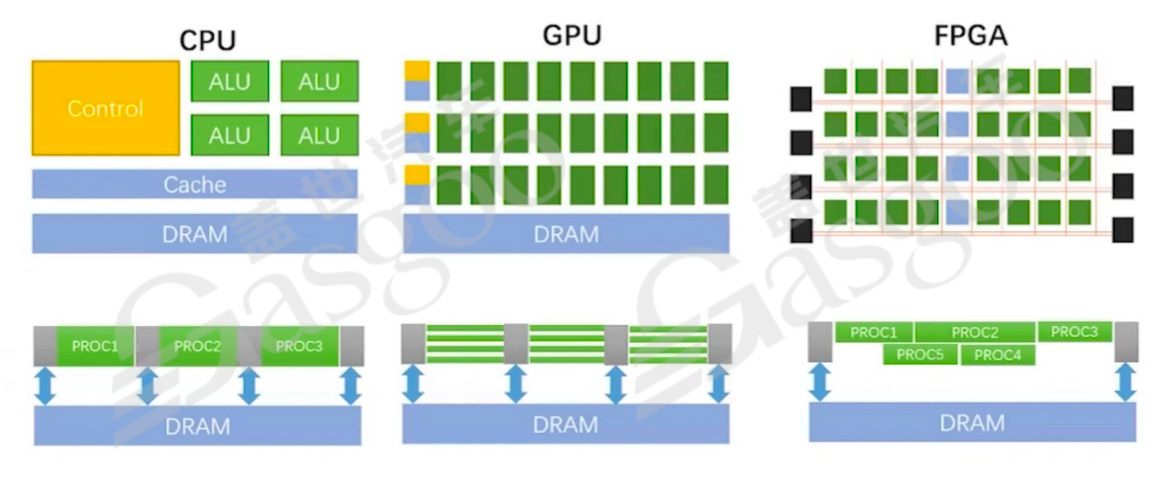
芯片作为底层核心,呈现显著的异构特性。冯·诺依曼架构将程序与数据存储在同一空间,适合处理多变业务,但总线带宽受限;哈佛架构分离程序与数据总线,在流式处理(如高频信号滤波)中效率更高。当前主流的SOC(系统级芯片)融合了CPU、GPU、FPGA等异构核心:CPU负责逻辑决策,GPU处理并行计算,FPGA优化特定算法(如雷达信号预处理),通过硬件资源的灵活调配满足多样化需求。
中间件与操作系统承担“桥梁”角色:操作系统决定资源调度策略,如实时操作系统(RTOS)保障功能安全任务的响应速度,Linux则支持功能实现系统的复杂计算;中间件则屏蔽硬件差异,提供统一的API接口,使算法开发无需关注底层细节。例如,辅助驾驶中间件需同时支持规则算法的确定性调度和网络模型的动态资源分配。
算法优化需与硬件特性深度适配。例如,深度学习模型需针对GPU的并行计算能力调整网络结构,规则算法则需利用FPGA的低延迟特性优化执行效率。这种“算法-硬件”的协同设计,既能满足功能安全的实时性要求,又能提升功能实现的迭代效率。
(二)车云链路的分层架构
车云一体架构从技术层面可分为四个核心环节,各环节既独立迭代又协同联动:
车端底层聚焦软硬件协同,包括芯片、控制器、操作系统和中间件。其核心目标是为上层提供高效、可靠的计算资源,如通过硬件加速模块降低网络模型的推理延迟,通过安全岛设计隔离功能安全与功能实现任务。
车端应用层负责业务逻辑实现,涵盖感知、融合、预测、规划等模块。其核心挑战是平衡算法的精度与效率:感知算法需在有限算力下保证识别准确率,规划算法需在复杂场景中快速生成安全路径。
云端底层构建数据基础设施,包括数据湖、容器化平台、分布式计算框架等。其核心功能是支撑大规模数据处理,如通过众包采集海量真实场景数据,通过仿真平台生成极端案例数据,为模型训练提供充足“养料”。
云端业务层实现闭环迭代,包括模型训练、评估、部署等流程。其核心价值是打通“数据-模型-车端”的链路:基于车端上传的差异数据优化模型,通过自动化测试验证效果,最终通过OTA(在线升级)推送至车辆,形成迭代闭环。
这一架构的关键在于“快慢分离”:功能安全系统依托车端底层的稳定硬件,采用慢周期迭代;功能实现系统借助云端的灵活算力,实现快周期更新。两者通过标准化接口通信,既保证了安全系统的可靠性,又释放了实现系统的创新活力。
四、行业实践中的挑战与应对策略
(一)跨域协作的壁垒突破
整车开发与互联网开发的思维差异,在团队协作中表现为显著的“语言壁垒”。MBD工程师与CBD工程师因工具链、方法论不同而难以协同,功能安全团队与功能实现团队因目标优先级差异而频繁冲突。
解决这一问题需从两方面入手:一是构建跨域人才培养体系,例如要求MBD工程师掌握C语言,CBD工程师理解模型仿真原理;二是建立标准化沟通机制,如通过统一的需求文档模板明确安全指标与功能目标,通过联合评审会议协调迭代节奏。
某车企的实践颇具参考价值:其设立“架构翻译官”角色,负责在硬件团队与软件团队间传递需求——将功能安全指标转化为芯片算力需求,将算法迭代需求转化为中间件接口规范。这种角色有效降低了跨域沟通成本,使硬件变更周期与软件迭代频率的匹配度提升40%。
(二)供应商生态的协同困境
整车厂与供应商的目标差异也加剧了矛盾:供应商追求平台化利润,倾向于提供通用解决方案;整车厂则追求产品差异化,需要定制化功能。这种矛盾在芯片、地图等核心领域尤为突出。
例如,芯片供应商为降低成本,推出通用SOC方案,但整车厂为优化辅助驾驶体验,需针对算法特性定制硬件加速模块;地图服务商为扩大覆盖范围,采用开源格式,而互联网车企为提升链路效率,采用自研格式,导致测试环节出现兼容性问题。
应对策略包括:一是建立联合开发机制,如整车厂与芯片厂商共同定义芯片架构,在满足通用性的同时预留定制接口;二是构建生态协议,如制定统一的地图数据交换标准,既保证互联网企业的链路自洽,又支持整车厂的测试验证。
某新势力车企的做法值得借鉴:其与芯片供应商签订“弹性合作协议”,核心算力模块采用通用设计,边缘加速模块则根据算法需求定制开发,既降低了供应商的研发成本,又保障了产品的差异化竞争力。
五、平衡功能迭代与功能安全的未来趋势
随着辅助驾驶等级的提升,功能迭代与功能安全的矛盾将更加复杂,但行业已呈现三大融合趋势。
一是方法论融合。传统车企将引入更多数据驱动理念,如基于真实路测数据优化功能安全策略;互联网企业则将强化流程建设,如为网络模型构建可解释性分析工具,在保证迭代速度的同时提升可靠性。
二是技术架构融合。车云一体将向“云边端”协同演进,云端负责全局优化,边缘节点(如路侧设备)提供局部感知,车端专注实时控制,通过多级协同平衡安全与效率。
三是人才体系融合。跨域复合型人才将成为核心竞争力,既懂汽车功能安全标准,又掌握机器学习算法的工程师,能更好地设计弱耦合系统,在加速迭代的同时守住安全底线。
总之,功能迭代与功能安全并非不可调和的矛盾,而是相互依存的关系。通过系统解耦、架构优化、生态协同,汽车产业有望实现“既快又稳”的开发模式,推动辅助驾驶从实验室走向大规模落地。
本文地址:https://auto.gasgoo.com/news/202507/11I70428889C106.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921