盖世汽车讯 据外媒报道,日本熊本大学(Kumamoto University)的研究人员通过开发一种用于线性周期性时变(LPTV)系统的高精度数学建模技术,在控制工程领域取得了重大进展。这项由先进科学技术学院副教授Hiroshi Okajima领导的开创性研究为改进自动驾驶、机器人技术和卫星导航等技术开辟了新的可能性。
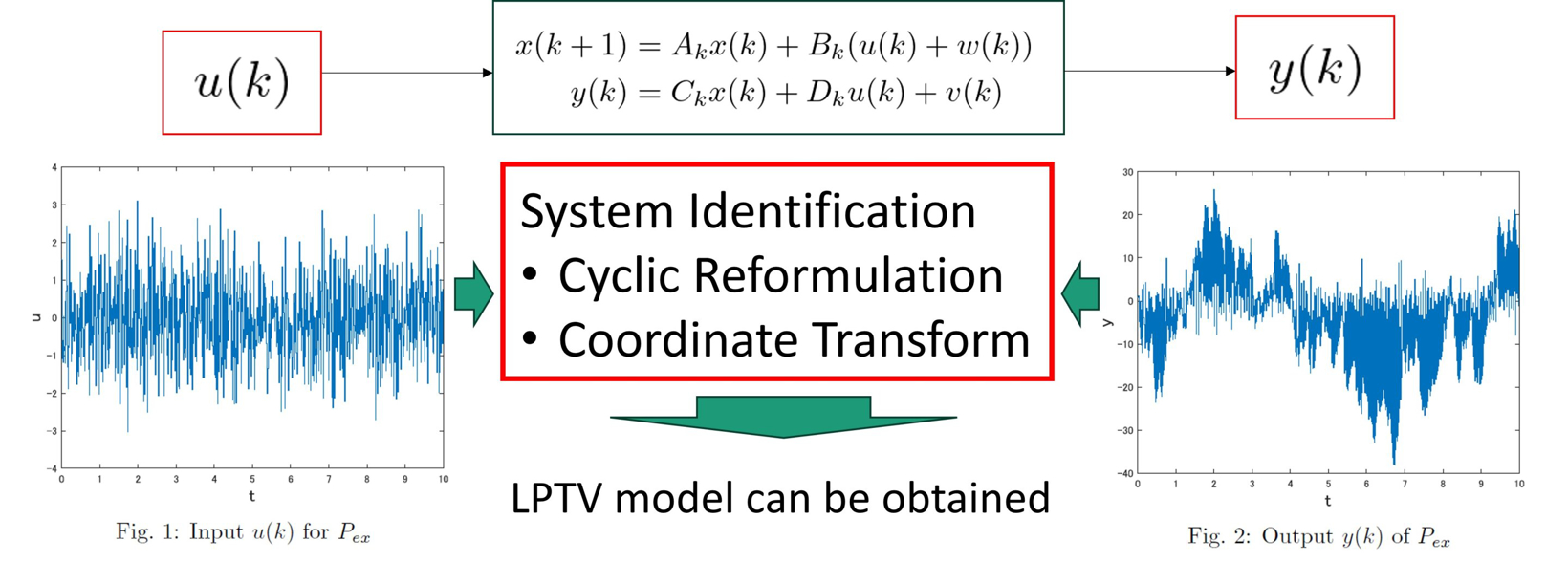
图片来源:期刊《IEEE Access》
自动驾驶汽车和工业机器人等应用中的控制系统依靠精确的数学模型来实现最佳功能。然而,随着时间的推移,其特性会发生变化的系统(称为线性周期性时变系统)对研究人员构成了重大挑战。传统方法难以准确地对这些系统进行建模,通常需要特定的输入信号和理想条件。
在期刊《IEEE Access》上发表的最新研究中,Okajima副教授的团队介绍了一种新颖的系统识别算法,该算法可提高LPTV系统建模的准确性。通过将一种称为循环重构的方法与状态坐标变换相结合,他们成功地设计出了一种无需依赖限制性假设即可提取基本系统参数的方法。
这项研究对依赖复杂控制系统的行业具有深远的影响。在自动驾驶汽车中,具有不同测量周期的多个传感器同时运行,这使得对包含不同传感器测量值的系统进行建模具有挑战性。新的建模技术使工程师能够更好地预测和优化系统行为,最终提高安全性和效率。
此外,这一进步还有利于航空航天应用,因为航天器和卫星遵循周期性轨道模式。通过提高精确建模此类系统的能力,研究人员可以增强任务规划和操作可靠性。
超越理论:现实世界的应用
为了验证他们的方法,研究人员使用MATLAB进行了数值模拟,证明该模型在准确性和效率方面明显优于现有技术。由于该方法不需要特定的周期性信号输入,因此更适合现实世界的应用。
“我们的研究弥补了系统识别方面的关键空白,”Okajima副教授表示。“通过克服建模LPTV系统的挑战,我们为自动驾驶系统、机器人技术等领域的进步铺平了道路。”
研究团队希望进一步完善他们的模型,并探索与行业合作伙伴的合作,将他们的研究成果应用于实际环境。凭借这一突破,熊本大学继续突破控制工程的界限,促进可能改变多个技术领域的创新。
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/news/202504/1I70421923C101.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921