盖世汽车讯 据外媒报道,纽约大学(NYU)坦登工程学院主导的研究团队开发出一种使自动驾驶汽车能够间接共享路况知识的方法,从而使每辆车即使很少在路上相遇,也能从其他车辆的经验中学习。这项研究解决了人工智能领域的一个长期难题:如何在保护数据隐私的前提下实现车辆间的知识共享。该论文已发布在arXiv预印本服务器上。
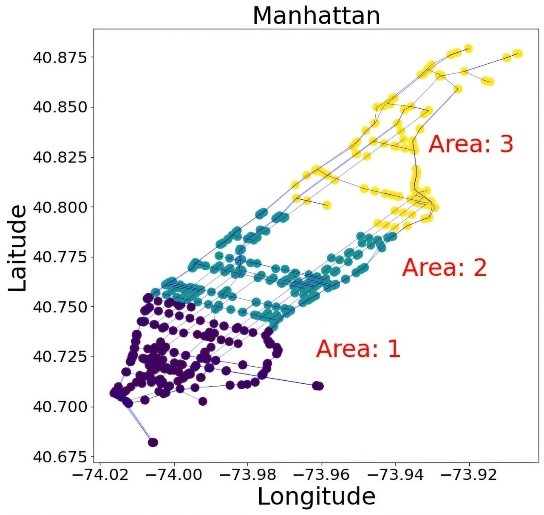
图片来源:arXiv
通常情况下,车辆仅在短暂的直接相遇时共享学习成果,而这限制了其快速适应新环境的能力。纽约大学坦登工程学院电气与计算机工程系教授Yong Liu解释道:“这项研究为自动驾驶汽车创建了一个共享经验的网络。一辆仅在美国曼哈顿(Manhattan)行驶的车辆,现在可以通过其他车辆了解布鲁克林(Brooklyn)的交通状况,即使这辆车从未曼哈顿行驶过。这将使汽车变得更加智能,并更好地应对未经历过的情况。”
研究人员将这种新方法命名为缓存去中心化联邦学习(Cached Decentralized Federated Learning,Cached-DFL)。与传统依赖中央服务器协调更新的联邦学习不同,Cached-DFL允许车辆在本地训练自身AI模型,并将这些模型直接与其他车辆共享。
当车辆之间的距离在100米以内时,它们会利用高速设备间通信技术来交换训练好的模型,而非原始数据。关键在于,车辆还可以传递它们从之前接触中收到的模型,允许信息在直接接触之外广泛传播。每辆车最多可缓存10个外部模型,并每120秒更新一次AI系统。
为防止过时的信息降低性能,系统会基于时效阈值自动淘汰旧模型,确保车辆优先采用最新相关数据。
该研究团队以曼哈顿街道布局为模板,通过计算机模拟验证了该系统。在实验中,虚拟车辆以约14米/秒速度沿城市的网格移动,并根据概率在交叉路口转向——直行的概率为50%,转入其他可用道路的概率相同。
传统的去中心化学习方法在车辆不常相遇时会受到影响,而Cached-DFL则不同,它允许模型在网络中间接传播,类似于延迟容忍网络(delay-tolerant networks)的信息传播方式,这些网络通过存储和转发数据来处理间歇性连接,直到连接可用。通过充当中继站,车辆可以传播知识,即使它们从未亲自经历某些情况。
Yong Liu解释道:“这类似于社交网络中的信息传播方式,车辆设备现在可以传递它们遇到过的其他设备的知识,即使这些设备从未直接相遇。”
这种多跳传输机制突破了传统模型共享方法依赖即时一对一交换的限制。通过让车辆担任中继站,Cached-DFL能够在整个车队中更有效地传播学习信息,而不是仅限于每辆车单独进行直接互动。
该技术使联网车辆在保护数据隐私的同时,能够学习路况、信号和障碍物信息。这对城市环境尤为重要,因为在城市中不同车辆面临多变条件但很少有足够时间进行传统学习。
该研究表明,车速、缓存容量和模型时效性均影响学习效率。更快的车速和更频繁的通信可提升学习效果,而过期模型会降低准确性。采用基于群体的缓存策略(优先保留不同区域的多样化模型而非仅最新模型)可进一步优化学习效果。
随着AI从集中式服务器向边缘设备转移,Cached-DFL为自动驾驶汽车提供了安全高效的集体学习方式,使其变得更智能、适应性更强。Cached-DFL还可以应用于其他网络化的智能移动体系统,如无人机、机器人和卫星,从而在实现群体智能的过程中推动稳健和高效的去中心化学习。

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202503/3I70419661C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921