
盖世汽车讯 在城市环境中,全球导航卫星系统(GNSS)经常会因高层建筑、车辆和其他结构造成的信号障碍而出现问题。这些障碍会导致非视距(NLOS)误差,从而导致定位不准确,这对自动驾驶汽车和智能交通系统等技术来说尤其成问题,因此可靠的基于GNSS的定位对于智能城市和交通网络的发展至关重要。
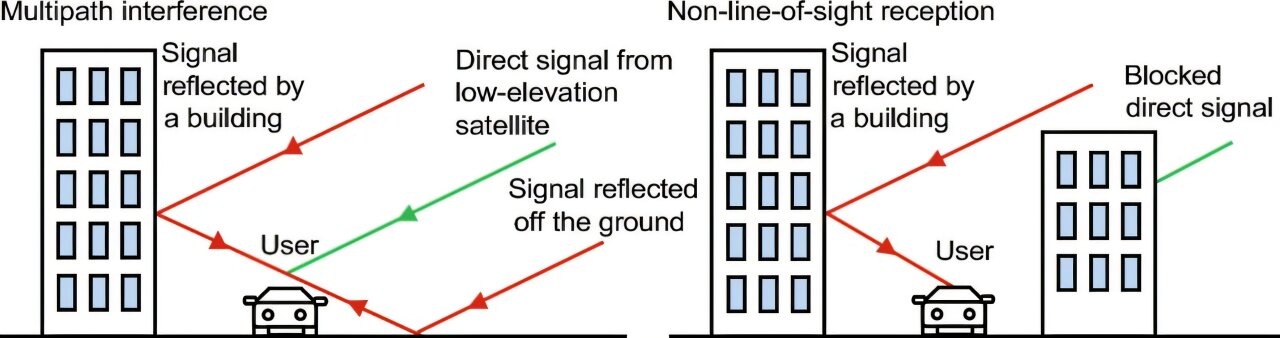
图片来源:期刊《Satellite Navigation》
据外媒报道,来自武汉大学、东南大学和百度的研究人员使用光梯度增强机(LightGBM)开发出由人工智能(AI)驱动的创新解决方案。该方法分析了多个GNSS信号特征,以准确识别和区分NLOS误差。这一突破有望显着提高基于GNSS的定位系统的精度和可靠性,使其成为城市导航的关键进步。相关研究已发表于期刊《Satellite Navigation》。
该模型的性能通过在中国武汉进行的动态真实世界实验得到验证,证明了其在具有挑战性的城市环境中的有效性。该方法涉及使用鱼眼相机根据卫星的可见性将GNSS信号标记为视线(LOS)或NLOS。然后,研究人员分析了一系列信号特征,包括信噪比、仰角、伪距一致性和相位一致性。
通过识别这些特征与信号类型之间的相关性,LightGBM模型能够准确区分LOS和NLOS信号,准确率高达92%。与XGBoost等传统方法相比,这种方法在准确率和计算效率方面均表现出色。
结果表明,从GNSS解决方案中排除NLOS信号可以显著提高定位精度,尤其是在障碍物较多的城市峡谷中。
首席研究员Xiaohong Zhang博士评论道:“这种方法代表着在城市环境中增强GNSS定位的重大飞跃。通过使用机器学习分析多种信号特征,我们已经证明排除NLOS信号可以显著提高卫星导航系统的准确性和可靠性。这对自动驾驶和智能城市基础设施等应用具有深远的影响。”
这项研究对依赖GNSS技术的行业具有巨大潜力,包括自动驾驶汽车、无人机和城市规划。通过改进对NLOS误差的检测和排除,该方法可以提高GNSS系统的精度,使人口密集的城市中的导航更安全、更高效。随着城市变得更加智能和互联互通,这一进步将在支持下一代交通和导航技术方面发挥关键作用。

*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202412/5I70412551C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921
















