
2024年12月18日,在第二届具身智能产业发展论坛上,国讯芯微(苏州)科技有限公司创始人方婷婷向现场嘉宾分享了“灵躯慧控,践梦星河——具身智能控制系统的发展与落地”的主题报告。
国讯芯微是一家聚焦工业实时操作系统及工业软PLC的技术研发、产品化研发、生产、销售为一体的高科技企业,致力于为智能制造输出自主化可控核心技术产品。公司基于ARM体系芯片平台研发自主化NOM系列产品,并结合自主研发的工业实时操作系统NECRO和NECRO SUPER STUDIO自动化软件构成了一套完整的控制系统平台产品,可为各个工控领域提供开放式自动化控制系统、自动化开发工具和完整的自动化、运动控制解决方案。
目前,公司前沿解决方案支持人形机器人、特种机器人、无人车、无人机等多种终端,广泛应用于制造、物流、半导体等多个领域。在具身制造场景中,实现了多传感器和执行器的协同工作,提升了生产自动化水平。同时还在磁悬浮高速线上实现了柔性制造,展示了系统的高度灵活性和适应性。未来我们将持续深化与生态伙伴的合作,推动智能控制系统在更多领域的应用,共同探索海陆空全方位的智能化解决方案。

方婷婷 | 国讯芯微(苏州)科技有限公司创始人
以下为演讲内容整理:
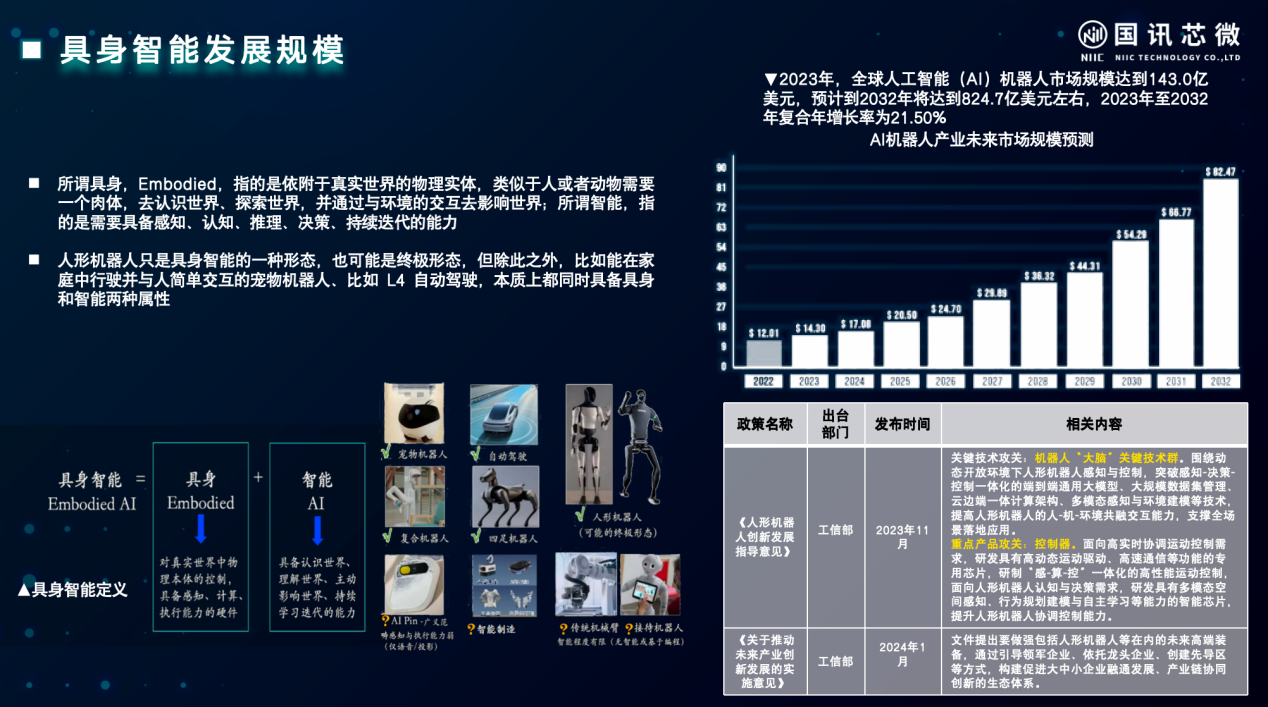
我们认为,具身指的是依附于真实世界的物理实体,类似于人或者动物需要一个肉体,去认识世界、探索世界,并通过与环境的交互去影响世界;智能指的是需要具备感知、认知、推理、决策、持续迭代的能力。
人形机器人只是具身智能的一种形态,也可能是终极形态,但除此之外,能在家庭中行驶并与人简单交互的宠物机器人、比如 L4 自动驾驶,本质上都同时具备具身和智能两种属性,因此自动驾驶是最早落地的一个很典型的路面具身智能体。
图源:演讲嘉宾素材
相关报告预测,2032年全球人工智能(AI)机器人市场规模将达到824.7亿美元左右,2023年至2032年复合年增长率为21.50%。
关于当前具身智能面临的痛点,问题种类繁多,且各厂商所遭遇的挑战亦十分多样。以传感器制造商为例,当前市场上的传感器种类繁多,涵盖了各种通讯方式、接口标准、形态设计及应用场景,均试图融入人形机器人的构建中,如摄像头、雷达等。然而,这其中蕴含着诸多关键问题。尽管各传感器制造商在其细分领域内的精度、扭矩等方面均表现出色,但由于通讯手段的差异,数据接入的精确度也各不相同。因此,对于所有数据的同步一致性,以及建模所需的数据基础而言,均显得尤为薄弱。实际上,当前缺乏一个能够同步高质量数据的基础框架。
传感器的数据基础参差不齐,缺乏全面的物理数据支持,无法实现多模态感知的全面性。同样,仿真技术也面临数据缺失的困境,缺乏数据则无法进行建模。建模过程不仅依赖于虚拟数据和合成数据,更需要物理数据的支撑,以便更好地应用于实际场景。在模型训练方面,由于高质量数据集的缺乏,当前资源处理完全依赖于云端,而云端的冗余负担极为庞大且繁重。此外,当前的执行器与传感器在诸多方面存在相似性。制造商众多,通讯方式多样,但效率、执行速度及执行精确度均存在差异。
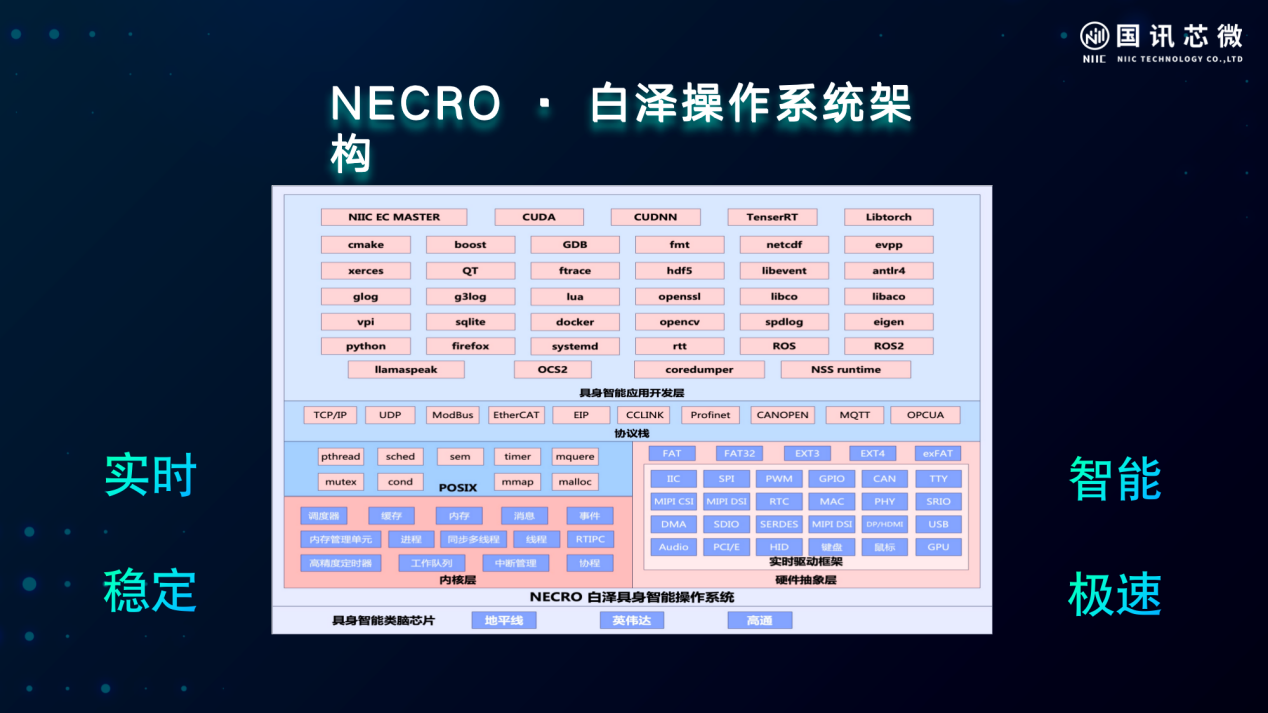
国讯芯微始终致力于针对行业痛点进行深入研发与创新,从用户视角出发,精准把握市场需求与产品导向。我们今年发布了一款通用具身智能操作系统,NECRO白泽,该操作系统旨在为智能设备提供一个统一化的软件平台,全面支持各类上层应用的运行,以及系统指令集的管理、调度与任务处理。
NECRO白泽的主要特性在于,自主硬实时性、微秒级的操作系统抖动控制、纳秒级的中断响应速度,以及高效的优先级调度与同步机制。原先基于Linux开源系统或X86架构上的资源,均可直接在该平台上实现无缝对接与高效利用。我们已完成了大量的跨平台支持工作,确保系统的广泛兼容性与应用便利性。
图源:演讲嘉宾素材
此外,NECRO白泽还创新性地推出了同步多主站功能。目前,行业内已有部分厂商开始重视节拍控制的重要性。而国讯芯微作为全球唯一一家能够支持多主站同步,且精度可达纳秒级的厂商,我们的系统实现了最小控制周期抖动仅为125微秒的卓越性能。
众多终端设备制造商目前所面临的数据处理量,尤其是关节数据量,尚不算庞大。然而,随着多模态传感器的全面接入,以及全身关节、灵巧手及足部的全面融入,其所需处理的数据量将急剧增加。对此,我们能够在单一SOC中实现大脑与小脑功能端到端整合。
在操作系统上,我们研发了一套加速算法。无论是人形机器人还是具身智能设备,其内部运行的大量应用均涉及矩阵加速运算。我们采用了一颗英伟达的SOC,并配备了275 TOPS的GPU算力。在实际应用中,当接入摄像头等传感器或运行运动算法时,往往会导致算力资源迅速耗尽,资源消耗极为庞大。而我们的星速NMA矩阵加速算法,能够实现60至150倍的算力提升,有效应对这一挑战。
我们同时提供了全面的具身应用库支持,该操作系统上的库资源极为丰富,构成了一套完整的具身开发全家桶,涵盖了具身开发中常用的各项功能。此外,我们还支持在X86平台上跨运行的OCS2,这一动力学仿真工具在足式机器人领域应用广泛,同样可在我们的平台上顺畅运行。截至目前,我们的应用库已包含约400多种工具与库资源,其中不仅涵盖了具身智能领域的常用工具,还包含了智能制造领域的常用库资源。
在操作系统的架构设计中,上层为主要应用开发层,提供了一系列常用的工具集。在制造领域的运动控制中,我们整合了视觉、显示与运动控制的三位一体功能等,此类功能丰富多样,极大地提升了开发的便捷性。在中间层,我们支持的协议栈同样众多,且均为工业以太网协议,确保了系统的兼容性与稳定性。
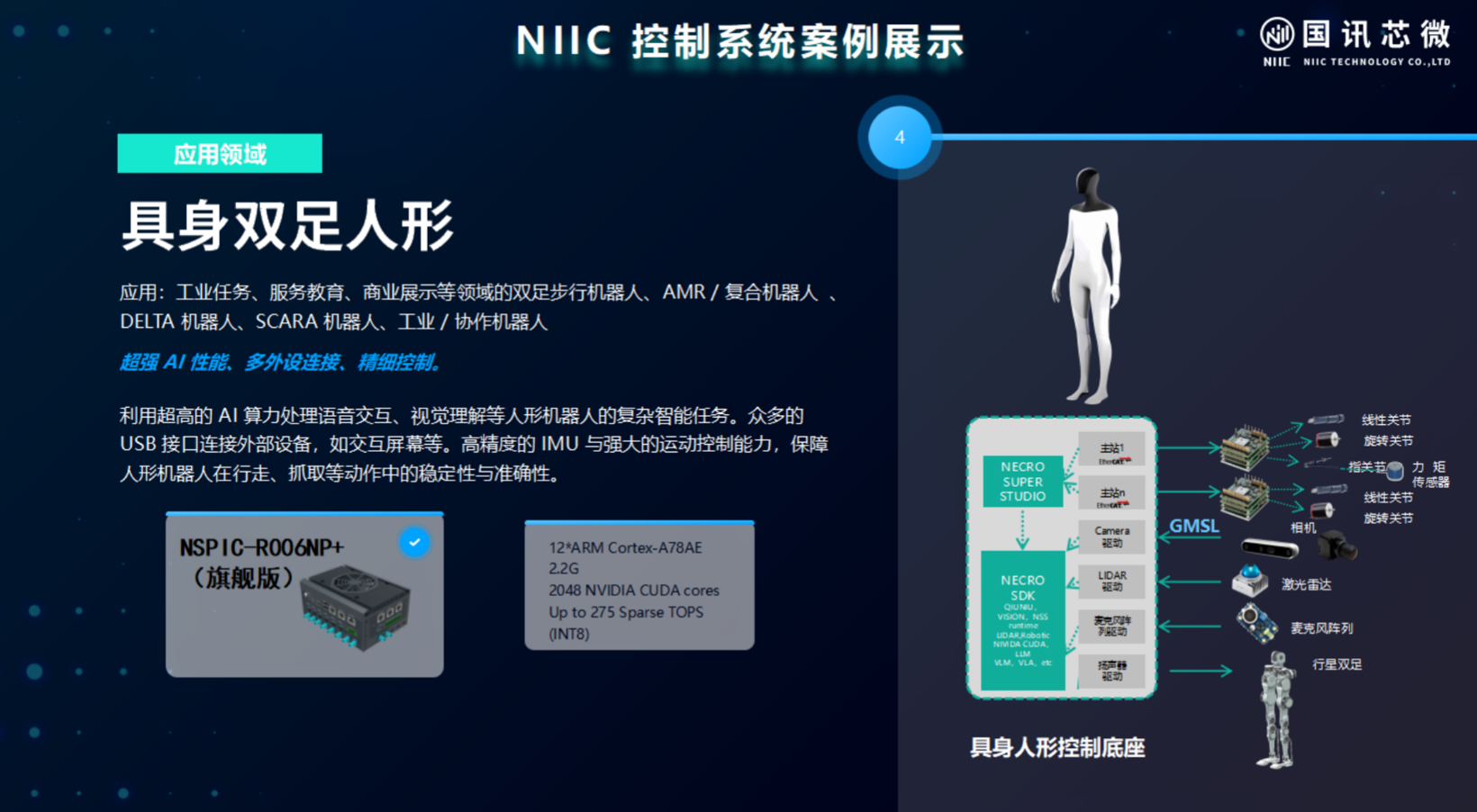
今年我们家推出了一款基于芯片级的硬件统一化产品——NSPIC-R006NP+。该产品是在约30家人形机器人本体制造商的共同参与下,根据联合定义的需求而研发的。它提供了两种安装方式,悬挂安装和耳片式安装,通常被置于人形机器人的胸腔内部,并大多在胸腔后侧配备一个电池包。
这一产品的尺寸为170 x 120 x 77mm,并已有多家客户实现了量产提货。在产品设计中,我们充分考虑了散热与风冷性能,确保平均无故障时间可达10万小时以上。该产品支持A78E 12核处理器,其算力能力可类比于Intel的i9处理器,同时支持5路多主站的同步操作,最大增力频率可达8K赫兹,并配备了丰富的CAN和RS485接口。
NSPIC-R006NP+还支持全GMSL视觉系统,能够同步实录深度相机和RGB相机的数据。其算力高达275 TOPS,目前已有客户在其上运行7B至13B不等的模型,具体算力需求根据各模型的特点而定。此外,该产品能够高速、高精度地采集各类传感器和执行器的数据,并在我们的操作系统中实现同一时间片下的DC同步,确保控制的同步性。
今年以来,我们一直致力于适配工作的推进,不仅仅局限于操作系统与应用软件的适配,更涵盖了硬件零部件的适配。作为人形机器人或具身智能的控制器系统,我们深知与各类零部件制造商进行深入适配与连接的重要性,无论是传感器、关节还是执行器,唯有实现全面打通,方能确保客户即采即用,无缝集成。
我们的适配工作聚焦于器件一体化与通讯一体化。在国讯芯微的具身人形融合爆炸图中,我们适配的种类繁多,包括情绪表达模块、语音语义处理模块、GMSL深度与高清视觉模块、高精度IMU、MID 360度全景相机、谐波关节、行星关节、多指灵巧手、伺服驱动器、六维力传感器等。此外,我们还适配了惯性捕捉等模仿学习套件,鉴于模仿学习需将数据传输至云端进行高质量处理,我们在此过程中提供了一层数据优化服务,以确保数据的精准与高效。
我们的操作系统支持超过400种工业级应用功能,几乎囊括了具身智能领域所需的所有工具。在具身零部件方面,我们已与约100多家厂商建立了合作关系。在与这些厂商的合作过程中,我们会对零部件进行详尽的功能测试和性能测试,以确保其质量和兼容性。此外,我们还要求通过为期三个月的稳定性测试。
我们还与仿真技术和通用大模型领域的企业展开了广泛的合作。鉴于未来数据基础与模型建立的复杂性,以及通用化技术平台构建的高成本,我们致力于将这些平台打造为通用化、标准化的解决方案。客户可以直接使用这些平台,进行快速调试和优化,从而大幅降低开发成本,提高开发效率。
基于该硬件平台,我们打造了一个完整的具身端到端基座解决方案。在业内,我们真正实现了从感知到决策再到执行的技术闭环,在具身端实现了端到端的一体化,并与云端实现了互通互联,通过API接口实现无缝对接。
据客户反馈,采用我们的解决方案后,他们的研发周期得到了显著提升,提升幅度达到5倍以上;同时,系统性能也实现了20倍以上的提升;综合成本则降低了约30%。
在面向的行业终端方面,我们涵盖了40多种具身终端类型,主要聚焦于具身人形、特种应用、无人系统和具身制造领域等核心赛道。这些终端应用广泛,涵盖了从挖煤、无人送货到生产制造等多种场景,种类丰富多样。
我们的控制系统在轮式人形机器人通讯及应用接口方面的解决方案中,通过我们的操作系统及其配套工具,用户可以迅速实现各类通讯的接入与整合,并高效处理各类复杂的传感器数据。
具身复合机器人这一领域以往在工业应用中颇为典型,传统做法往往需要配置多个控制器,并依赖一个总控系统进行协调与配置。而我们提供的解决方案,则仅需一个控制器即可替代这些复杂的配置。
目前,已有客户开始尝试将制造过程中的各类工作站进行打通与整合,如协作臂与工业臂的协同作业、3D摄像头的应用,以及传输与上下料系统的集成等,均采用具身化的方式进行。现场不仅涉及建模与仿真,还涉及数据补偿等步骤,以逐步提升其自主化作业能力。
图源:演讲嘉宾素材
目前,我们的客户群体涵盖了海、陆、空领域,我们期待未来能携手各界,共同征服这一广阔的市场。
(以上内容来自国讯芯微(苏州)科技有限公司创始人方婷婷于2024年12月18日在第二届具身智能产业发展论坛发表的《灵躯慧控,践梦星河——具身智能控制系统的发展与落地》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202412/23I70414354C106.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














