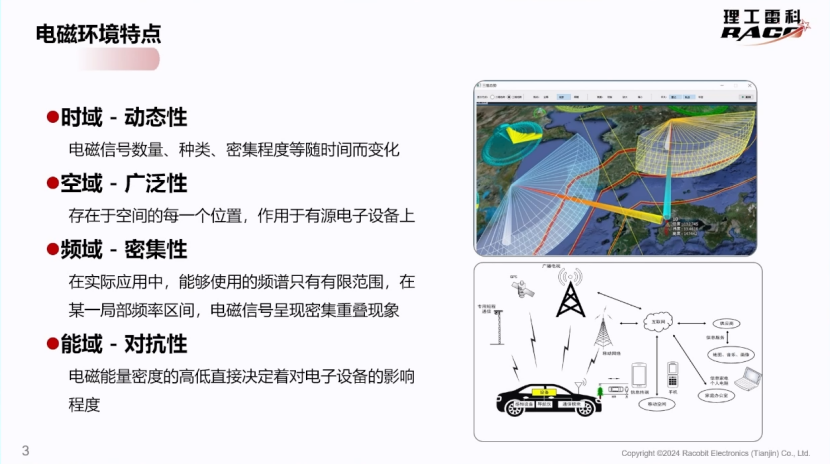
2024年10月24日,在第十二届汽车与环境论坛上,理工雷科电子(天津)有限公司副总经理盛蒙介绍,电磁环境特点呈现出四大特征。
在时域呈现出动态性,电磁信号数量、种类、密集程度等随时间而变化;在空域表现出广泛性,存在于空间的每一个位置,作用于有源电子设备上;在频域则有密集性特征,实际应用时能够使用的频谱只有有限范围,在某一局部频率区间,电磁信号呈现密集重叠现象;在能域体现出对抗性,电磁能量密度的高低直接决定着对电子设备的影响程度。
而构建逼真的电磁环境对电子装备在环境下的适应性检验具有重要意义。聚焦电磁环境建模技术,盛蒙从概要技术特点、技术影响、研究意义、传统装备应用等方面进行了系统阐述。同时聚焦电磁环境建模技术在智能网联市场的应用,盛蒙则从场景设定、场景建模、仿真测试和系统评估等层面分享了他的思考与经验。

盛 蒙 | 理工雷科电子(天津)有限公司副总经理
以下为演讲内容整理:
电磁环境建模技术概要
首先讨论电磁环境,这是一个抽象概念。通过几个实例来加深理解。近期无人机违规飞行频发,现有无人机反制技术,如虚拟电磁枪,通过照射诱导无人机降落,是典型应用。另外佩洛西蹿台,带来了除了有她本身的专机,还做了飞机E/A18G,在这款飞机的加持下可以在我们的防空领域上飞来飞去,它有相当强大的电磁环境的侦测和对电磁环境的覆盖和诱导的作用,使我们整个防空领域出现短时间盲区的情况。
这两个例子表明,电磁环境虽无形,却切实存在。随着智能技术的发展,电子设备使用频率由低频向高频演进,甚至达到太赫兹级别。这些电磁信号在环境中作用巨大,既有正面影响也有负面影响。因此,需先认识并了解电磁环境,以在复杂应用环境中发挥产品效能。
对电磁环境的理解可分为时域、空域、频域、能域四个维度。随着自动驾驶等级提升,需在这些维度上适配的方案多样,包括基于图像、激光、雷达及融合技术等。如何解决这些应用中的问题,是本次分享的主要议题。
图源:演讲嘉宾素材
之前提及的例子表示,在电子战飞机的支持下,其能轻松干扰雷达。同理,这种干扰可能对后续通信和图像系统造成影响,进而影响民生条件。因此,构建逼真的电磁环境并验证其对我们产品的适应能力至关重要,同时要验证这些产品面向市场之后,市场容量快速增加之后它的适应能力。这也是我们单位从传统意义上的工作到我们现在智能化之后持续在做的工作,就是我们要在研发阶段验证装备,以及后续真正意义上的路测阶段所做的工作。
电磁环境建模技术在智能网联市场的应用
在传统装备行业,从研发到产品定型需遵循相应流程,包括原理分析、模块验证、半实物验证及路测。在智能化前,路测是主要验证方式,自动驾驶等级考核中,行驶里程是衡量产品可信度的重要指标。如何在内场环境下找到与路测的平衡点,以实现最高效验证,是我们面临的挑战。
针对民品市场,我们需构建适应产品上市的环境。这包括考虑产品在何种场景下使用,从单一属性到复杂属性的进阶过程,即场景想定。场景想定决定验证的复杂度和脚本数,之后需构建环境属性要素模型,如雷达、通信、导航等,以进行验证和测试。在产品定义阶段,需明确市场定位和产品定义,产品设计后需进行大量测试,有效的测试手段和方法可加速产品迭代,最终面向消费者进行路测。
图源:演讲嘉宾素材
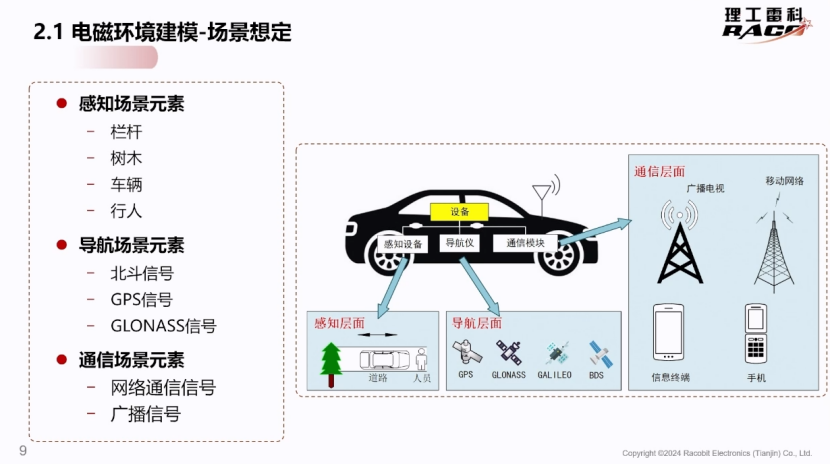
以车辆为例,智能化车辆装备多种传感器,包括雷达、图像、超声、车载通信及导航等,这些传感器使车辆成为集多种功能于一体的载体,满足自动驾驶、车内娱乐、车辆定位等需求,重新定义车辆软件终端或更高级别的用户体验。这些环境要素是各行业共同面临的挑战,后续演讲将涉及传感器升级对车辆体验的影响、传感器融入自动驾驶以推动其发展,以及车辆与5G/6G网络融合的应用。
在清晰了解车辆环境属性后,接下来的任务是建模。行业内已存在多种建模工具软件,涵盖交通场景、底盘、车辆动力学等多个方面,这是产业链多年发展的积累。近年来,随着自动化和智能化的发展,尽管智能化传感器融合建模在各自领域有所应用,但尚未有效开放或深入探讨。
例如,车辆安装自动驾驶传感器(如雷达、激光)后,随着车辆和品牌数量的增加,面临同频干扰、异频干扰以及交汇车干扰等问题,需共同解决。此外,车载导航定位使用GPS、北斗、伽利略等不同系统,其精度各异。在中国复杂路况下,如何有效融合北斗、GPS等导航信号,实现高精度定位,以及车载语音系统、影音娱乐系统的电磁安全性、与5G网络的兼容性等,均需构建相应模型。
构建模型后,需进行大量研发和测试,以完成产品定型和上市。传统车辆测试更多依赖路测,而智能车辆需将内场环境与路测环境结合,以优化投入产出比。目前,路测仍是主流,但实验室环境与真实路测存在差异,内场环境主要进行功能性验证,尚未达到性能验证标准,这减缓了产品上市速度。
内场与外场路测数据的有效衔接是测试方案进阶的关键。以雷达为例,传统雷达厂商采用半实物仿真环境(如转台、机械滑轨)进行基础功能验证,但受限于场地、机械环境和经费,难以全面验证复杂场景。因此,行业采用边界测试架结合路测来实现雷达性能验证。
雷达还面临杂波问题,内场杂波固定,外场杂波实时变化。如何结合内外场杂波解决不同交通路况下雷达性能验证,是测试手段必须解决的问题。同时,雷达干扰也是一个重要问题,特别是在76-79GHz频段内,需不断验证干扰环境下雷达性能。
北斗授时定位精度与GPS存在差异。国家推动北斗产业链落地,需加速北斗产业发展并推动关键技术。在北斗与雷达频段进阶方面,需解决精度差距问题,确保高阶驾驶过程中授时定位精度。
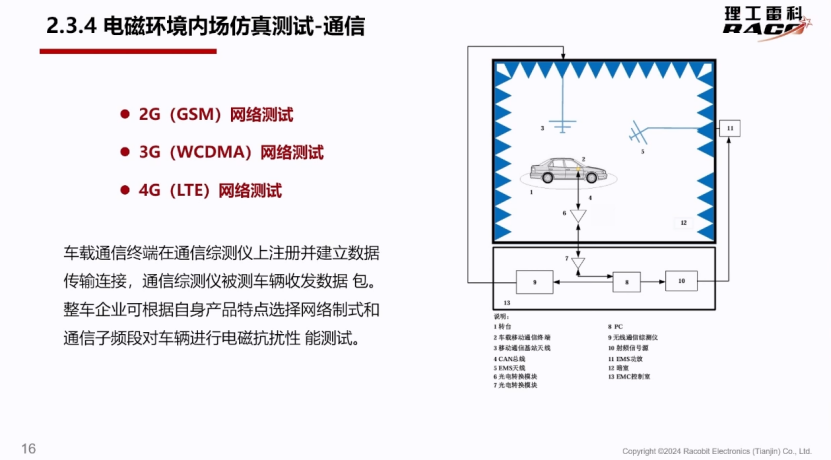
此外,车载通信也是重要方面。需适应5G-A及未来6G技术在车上的应用,解决测试应用手段上的问题。
图源:演讲嘉宾素材
通过框架型整体验证思路,结合路测和内场技术,优化投入产出比,同时解决复杂场景验证问题,是测试产业或测试行业持续发力和解决的重点。
最后,关于评估体系,它是衡量产品好坏的重要标准,需要行业内持续积累的认知来定义。对于雷达领域,虽然已有强大的评估体系,但军用雷达与民用传感器的指标考核存在差异。传统雷达的虚警率和漏警率等指标适用于远距离雷达,而近距离雷达则需考虑探测率等其他指标。同样,导航的评估体系也需适应民用需求。
南京电动自行车火灾事件促使摩托车和电动自行车在上市前增加强检项目,这体现了导航体系在车辆定位、事故追踪等方面的重要性。此外,通信技术的发展也深刻影响着产品应用,如5G-A的感知能力应用于低空经济,以及未来低空飞行汽车的通信交互需求。
综上,复杂环境虽然无形,但深刻影响着我们的工具和民生产品。因此,构建复杂环境评估体系需要相应机构、单位和公司的持续努力,以支撑产品研发和上市所需的工作。
理工雷科研究基础
最后,介绍下理工雷科。理工雷科天津成立于2015年,是雷科防务旗下北京理工雷科电子信息技术有限公司投资设立的高科技研发企业,核心业务主要为雷达系统、智能网联仿真测试、通信测试等领域的产品研发、设计和制造等。

图源:演讲嘉宾素材
理工雷科源自北京理工大学,该大学作为国防七子之一,使我们早期便接触雷达、遥感、卫星等专业领域。近年来,我们见证了雷达、遥感和通信领域在民生行业的广泛应用,作为该领域的从业者,我们深感荣幸。这不仅为我们在国防事业中发挥作用,也为我们在民生行业提供了广阔的发展空间。
基于这些领域,公司研发了一系列产品,持续推动业务发展,支撑整个产业链,确保产品在国内乃至全球市场中占据一席之地,让中国红持续闪耀世界!
(以上内容来自理工雷科电子(天津)有限公司副总经理盛蒙于2024年10月24日在第十二届汽车与环境论坛发表的《电磁环境建模技术在智能网联汽车仿真测试中的应用》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202410/30I70408974C106.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921