盖世汽车讯 确保机器人能够在现实环境中与人类顺利协作是实现大规模部署的关键一步。虽然一些机器人系统已经能与人类代理进行日常互动,例如在部分自动化的工业和制造设施中,但日常任务中的人机协作仍然很少。
据外媒报道,意大利帕多瓦大学(University of Padova)和剑桥三菱电机研究实验室(Mitsubishi Electric Research Laboratories,MERL)的研究人员开发出新框架,可帮助规划涉及人机协作的任务。该框架相关论文已预先发表在arXiv服务器上,专门关注需要协作组装复杂系统与各种底层组件(例如家具)的任务。
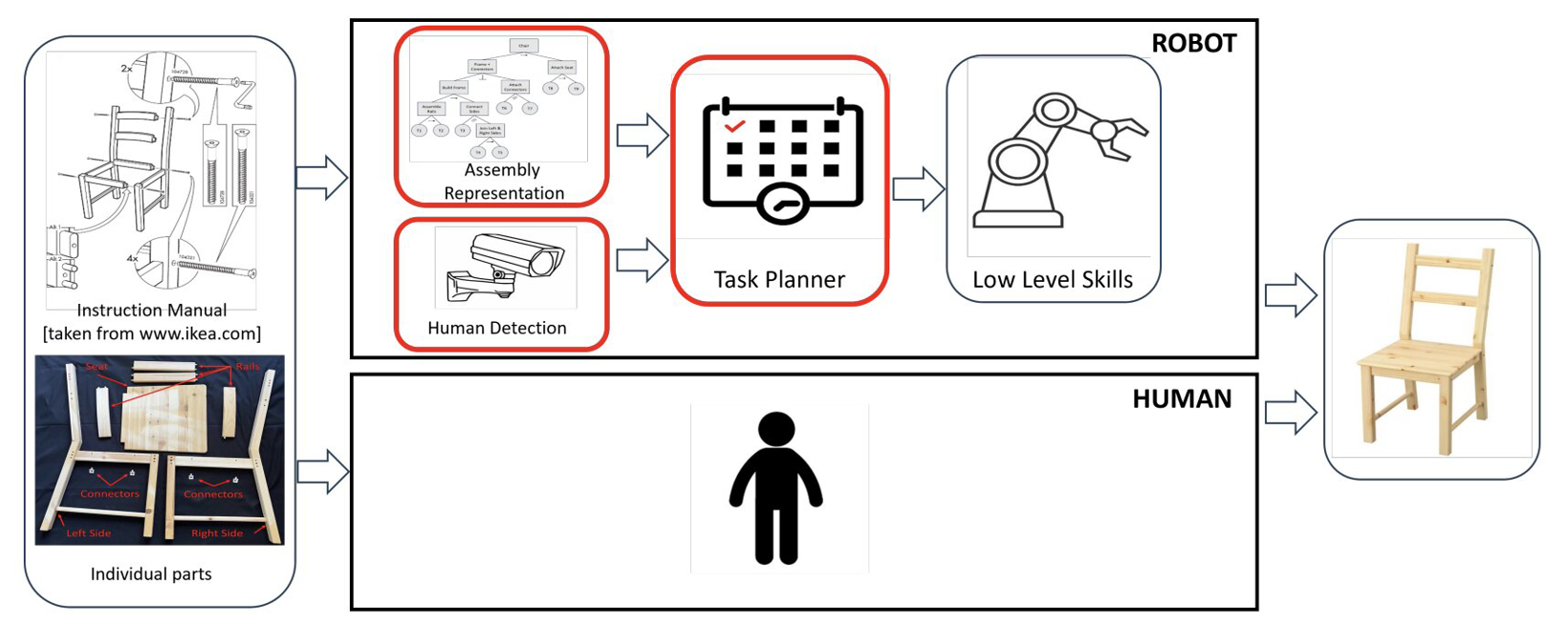
图片来源:arXiv
研究人员将该框架称为DECAF,即基于离散事件的家具人机协作装配框架(Discrete-Event based Collaborative Human-Robot Assembly Framework for furniture)。DECAF具有各种底层组件,包括离散事件马尔可夫决策过程(DE-MDP)模型、装配过程的HTM描述和贝叶斯干扰(Bayesian interference)模块。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202409/20I70405647C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921