

盖世汽车讯 据外媒报道,美国田纳西大学(University of Tennessee)研究人员发现,机器人汽车在与人类驾驶的车辆混合行驶时,可以优化城市交通流量,从而提高交通效率、安全性和能耗。
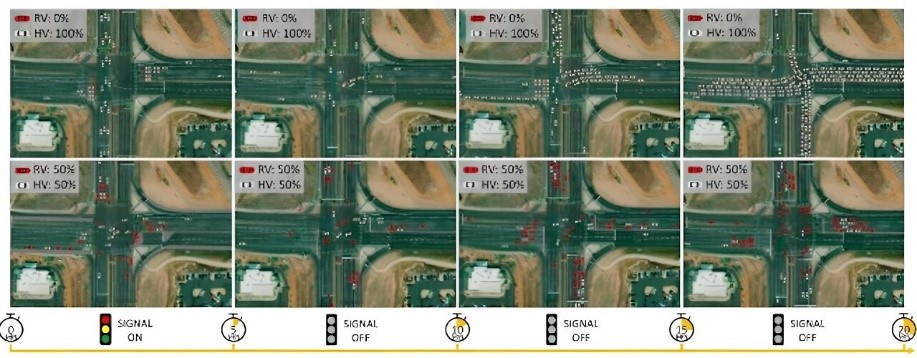
图片来源:University of Tennessee
机器人汽车不再是科幻概念:自2016年以来,世界各地都在测试自动驾驶出租车(robotaxis)。随着机器人汽车在交通中的普及,以及从混合交通过渡到完全自主交通的可预见的漫长过程,研究人员想知道机器人汽车及其与人类驾驶车辆的互动是否可以缓解目前严重的交通问题。
田纳西大学研究人员设想,随着交通中机器人汽车数量的增加,或许可以利用人工智能开发算法来控制复杂的混合交通系统。这些算法不仅能让所有车辆从A点顺利行驶到B点,更重要的是,可以通过机器人汽车影响人类驾驶的车辆来优化整体交通。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202408/5I70400947C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














