

朗歌科技有限公司成立于2021年,致力于地图数据采集、生产体系的建立和运营。依托吉利上千万量产车和吉利各出行平台的上百万运营车辆全天候采集数据,通过深度学习、图像识别、三维视觉、智能机器人地图构建技术以及基于此的大数据云,打造多元数据采集、数据加工、数据产品化、数据服务化全链路的智能地图数据平台。
2024年5月22日,在第六届智能驾驶地图与定位大会上,据朗歌科技智驾算法部负责人杨川介绍,朗歌智驾地图数据模型独具四大图层,其中基础层与更新层凭借吉利量产车数据,构建高精度基础与高效更新机制,为智能驾驶赋能。OEM运营图层与智驾经验图层,则通过量产车反馈的轨迹等数据,共创经验速度与引导线,并涵盖动态ODD数据,提升智驾安全性与可用性。杨川主要围绕朗歌智驾地图产品、周天数据智能体系、智驾真值标注服务、车道级导航系统进行了详细说明。

杨川 | 朗歌科技智驾算法部负责人
以下为演讲内容整理:
朗歌科技介绍
朗歌科技由吉利控股集团战略投资,作为集团的数据底座,吉利控股集团旗下所有品牌的量产车数据都将回传至体系内图商监管的云端,也会为各品牌提供数据合规服务,保障量产车的数据合规、稳定。基于量产车的数据,我们打造了周天级高鲜度的智驾地图,并提供基于智驾地图的真值数据服务。旗下子公司湖北亿咖通获得了行业比较稀缺的导航电子地图制作甲级测绘资质,以提供所涉及的测绘及数据服务。围绕数据底座的定位以及智驾的需求,我们打造了以智驾地图为核心的三大产品体系,主要围绕驾、云、舱。智驾方面,我们提供一体、实时的智驾地图服务;在云上提供超低成本的自动化生成服务;在座舱上提供人机共驾的导航产品。

图源:演讲嘉宾素材
我们认为地图作为强大的先验信息,对智能驾驶系统具有显著的助益。智驾地图能够在多个方面对智能驾驶提供支持。我们参考了一篇公开文章中的表格数据,该表格详细记录了在不同场景下,智驾地图对静态道路感知能力的提升效果。特别是在长距离如240×60米的静态道路感知中,引入地图的先验信息能够显著增强系统的感知能力。
在静态道路的感知上,智驾地图能够提供车道级的信息;在动态目标事件上,智驾地图能够提供红绿灯的先验图层、动态信息,动态ODD;在轨迹预测和路径规划上,智驾地图可以提供车道级的引导线和车道的经验限速。基于此,我们认为智驾地图能够帮助提升智驾体验。
特别是当智能驾驶技术迈向下一个发展阶段时,人们关注的焦点将从“全国都能开”逐渐转向“全国都好开”的新阶段。在前一阶段,面对全国范围内不同路况和复杂环境,降低对地图的依赖成为了一个被广泛讨论的问题,人们提出了多种降低地图依赖的解决方案。而当步入L3、L4以及更高阶的自动驾驶时,地图作为冗余信息会更加重要。基于这一判断,我们未来将围绕智驾地图进行投入和研发。
产品方案亮点
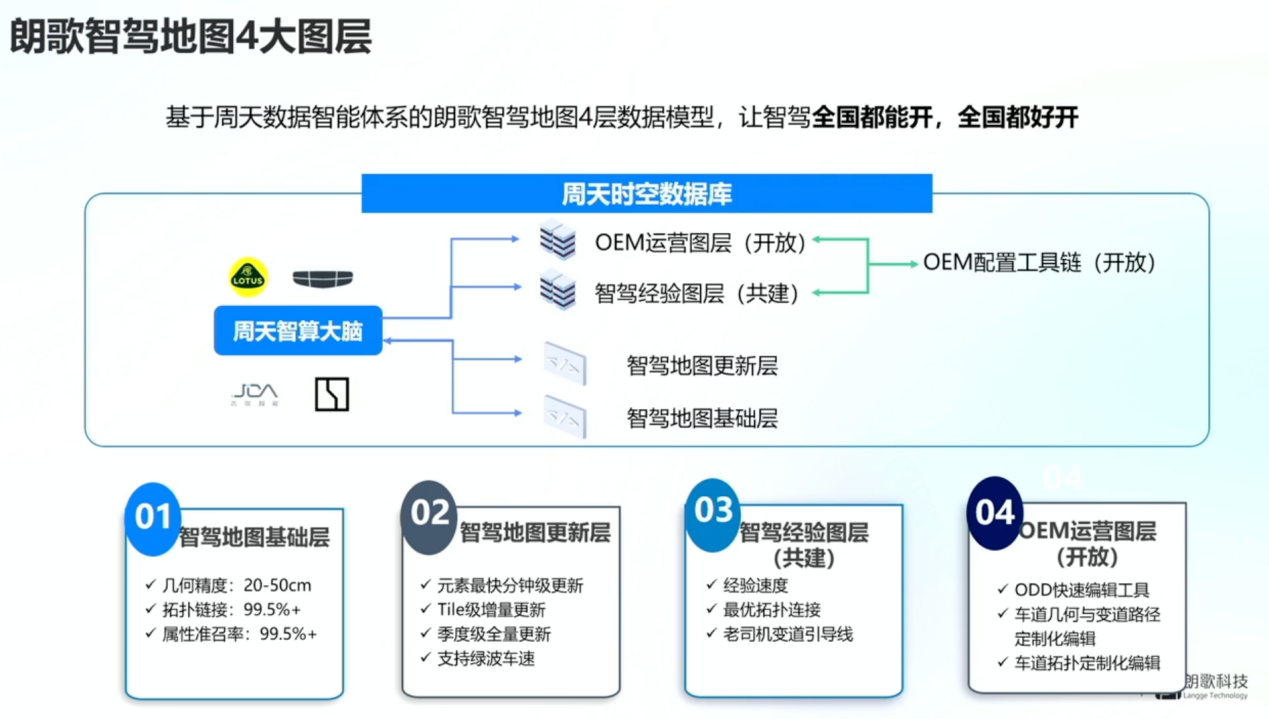
我们与业务各品牌车型智驾方联系紧密,共同探讨方案,深入合作,设计产品形态。朗歌智驾地图有四层数据模型,分别是智驾地图基础层、智驾地图更新层、智驾经验图层和OEM运营图层,前两层是我们基于吉利量产车数据所打造的,后两层是与智驾方共建,形成了开放的OEM配置工具链。针对不同的图层,我们遵循需求导向的原则,进行了特色化设计。我们从一开始就致力于实现城市、城快以及高速路段的一体化设计,为智能驾驶系统提供全场景下的NOA能力。
图源:演讲嘉宾素材
为了满足不同场景下的智能驾驶需求,我们进行了大量定制化的设计。例如在掉头区设置了更大的可行驶区域,能够帮助提升智驾操作的成功率。我们基于实际需求出发,进行了多项定制化的设计,旨在进一步提升智能驾驶系统的性能和可靠性。
针对智驾感知的薄弱场景,我们与各品牌车型智能驾驶部门进行了多轮深入沟通,从而形成了对现有地图数据的有效补充。这些补充主要针对智能驾驶系统难以准确感知的复杂场景,目前我们已经覆盖了超过85万个危险场景的ODD,显著提升了智能驾驶系统的安全性。此外,我们还提供动态信息,以支持NOA功能。
除了基础图层和更新图层外,我们能够从大量量产车的回传数据中提炼出对智能驾驶系统极具价值的信息,并据此构建出对智能驾驶具有显著帮助的图层。例如在隧道环境中,由于隧道光线条件各异,有的光线明亮,有的则较为昏暗,基于这些不同的光线条件,我们设计了不同的经验限速,让智能驾驶系统的行为更加拟人化。
拓扑优化层面,传统地图大多人工编辑引导线,许多时候对智驾而言并不友好。基于此,我们会在获取到大量量产车的轨迹数据后,自动化生成更加适合智驾行驶的引导线。
量产交付方案
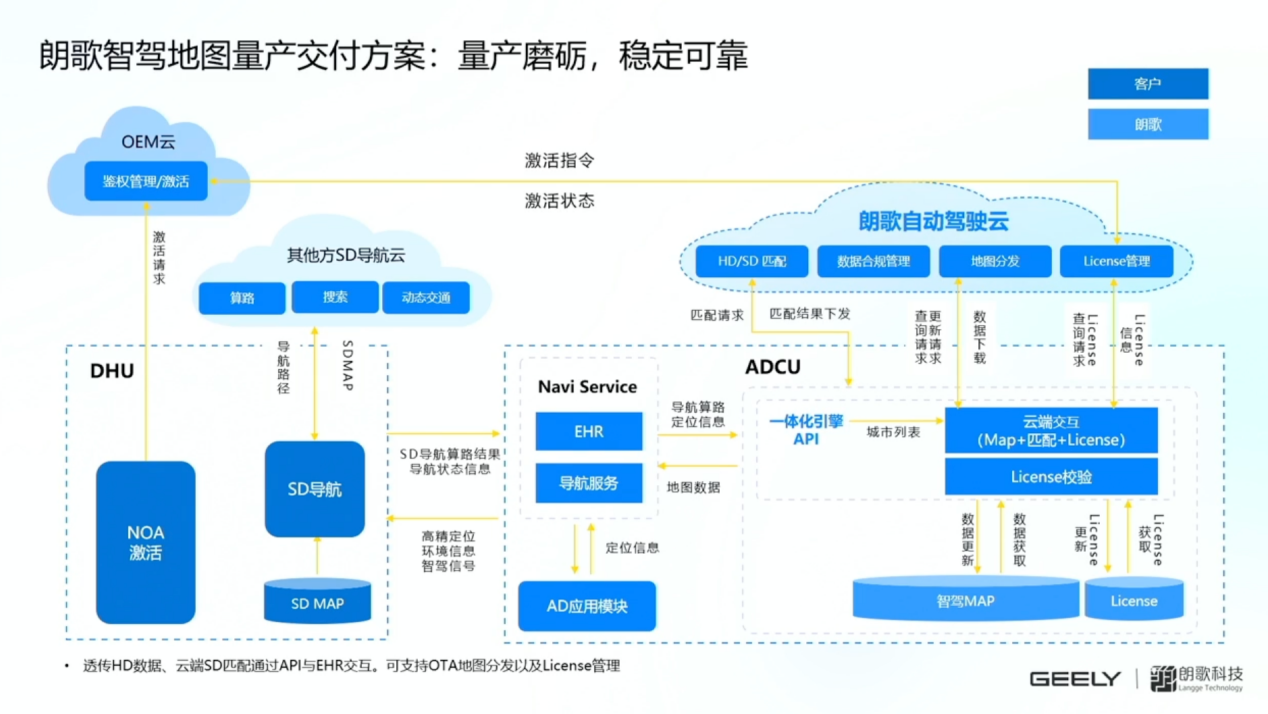
在智能驾驶的地图应用方面,我们从座舱域的SD导航出发,通过跨域通信将导航结果传输至智驾域。随后,我们会做SD导航路径与智驾地图的匹配,完成匹配后通过一体化的智驾地图引擎进行地图数据的播发,以满足下游AD应用的需求。
图源:演讲嘉宾素材
此外,量产中比较重要的license管理和OTA升级两大模块的开发工作已经完成,并且整体方案已成功实现量产。在交付过程中,智驾地图引擎是一个重要模块,智驾地图引擎是衔接智驾地图和AD应用的桥梁,为了更高效地集成,我们设计了“三明治”架构。这一架构分为三层,上层是智驾层,与智驾应用进行交互,中层是引擎层,最下层是系统层。通过三层设计,我们能够快速与智驾方适配。同时,由于引擎核心的功能层进行了解耦,我们能够实现快速无感升级和快速定位发现问题。基于此,我们在三周内实现了智驾城高一体路测跑通。
除引擎外,我们还可以提供基于地图融合定位的能力,这是智能驾驶系统所必需的,以确定车辆在地图上的准确位置。我们与地图数据紧密结合,充分利用了绝对定位技术,并通过感知结果与地图数据进行匹配,从而形成了融合定位的解决方案。通过与我们的地图数据紧密配合,同时针对不同场景进行深度打磨,实现更高的适应性和定位精度。目前这一产品已经在低算力平台实现了量产。
周天智能体系
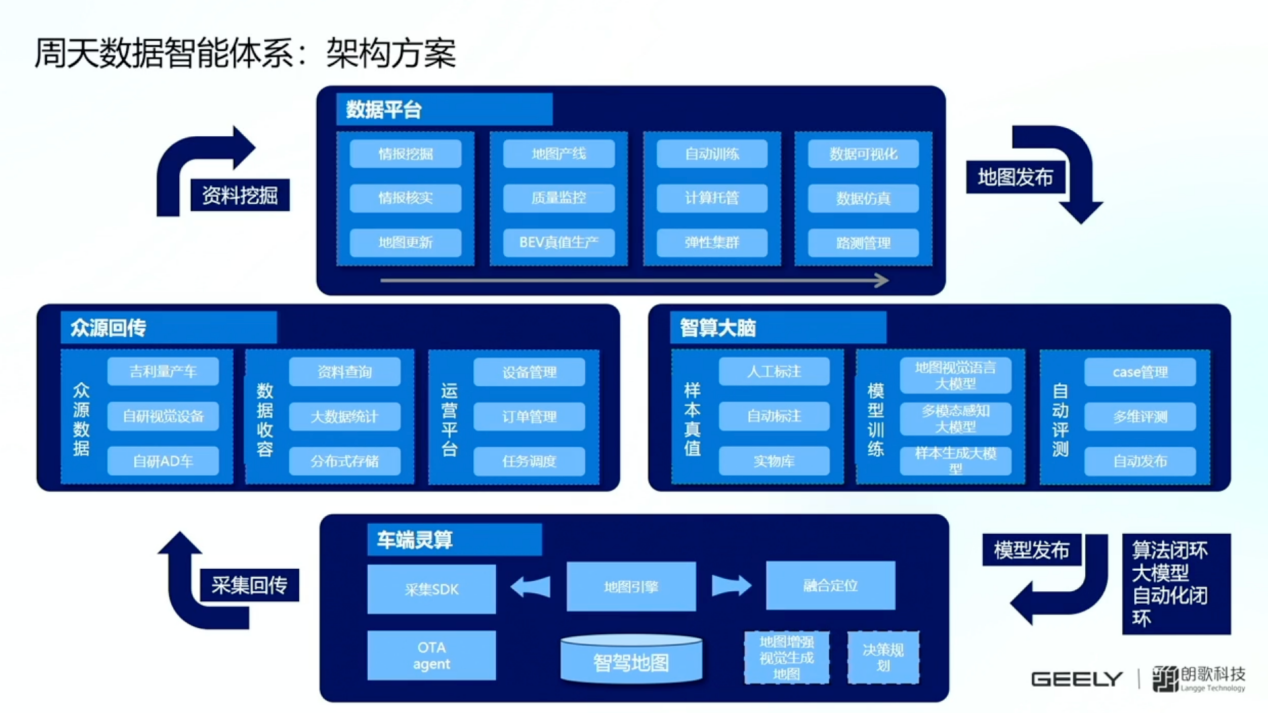
周天智能体系构建了一个基于数据闭环的完整流程,实现了从云端自动化成图到车端部署,以及车端数据采集回传的闭环系统。周天数据智能体系架构方案由四个部分组成。首先,从车端开始采集数据并回传云端,并通过众源回传平台对数据进行收拢、高效存储并支持快速查询;随后,进入数据平台进行自动化的地图生产和发布;最后,通过智算大脑提供模型训练以及真值服务,并将模型部署至车端及数据平台。
图源:演讲嘉宾素材
在周天数据智能体系中,地图自动化生产技术是该体系的核心。我们基于量产车回传的数据,完成了整个众包自动化建图链路的开发,并在示范道路上进行了验证。核心指标满足智能驾驶需求,横向精度达到35厘米,关键要素召回率达到95%以上。
除了众包轻地图的建图流程外,多模态地图大模型也是关键部分。之所以做多模态大模型,是因为我们更关注云端处理,有更充足的算力。凭借朗歌丰富的数据资源,包括轨迹数据、激光点云数据、量产车回传的矢量数据及部分图片和原始传感器数据,我们设计了多模态地图大模型。该模型主要分成三个部分:
一是多模态输入,我们设计了coarse-to-fine的金字塔非刚性ICP对齐算法,实现了多趟资料的柔性对齐,有效降低了多趟多帧资料的对齐误差,提升多模态大模型的训练效率;二是大场景特征融合,设计了多模态融合以及长时序融合技术,同时基于全局特征地图方案实现了多趟数据的融合,通过大场景的特征融合方案提升了复杂场景的地图生成能力,支持大范围地图端到端生成;三是端到端多任务输出,自适应多任务权重学习,非均匀几何采样的mapTR Header设计,有效提升多任务模型的地图精细化表达能力以及多任务训练精度。
(以上内容来自朗歌科技智驾算法部负责人杨川于2024年5月22日在第六届智能驾驶地图与定位大会发表的《朗歌智驾地图与周天智能体系》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202405/29I70393929C106.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














