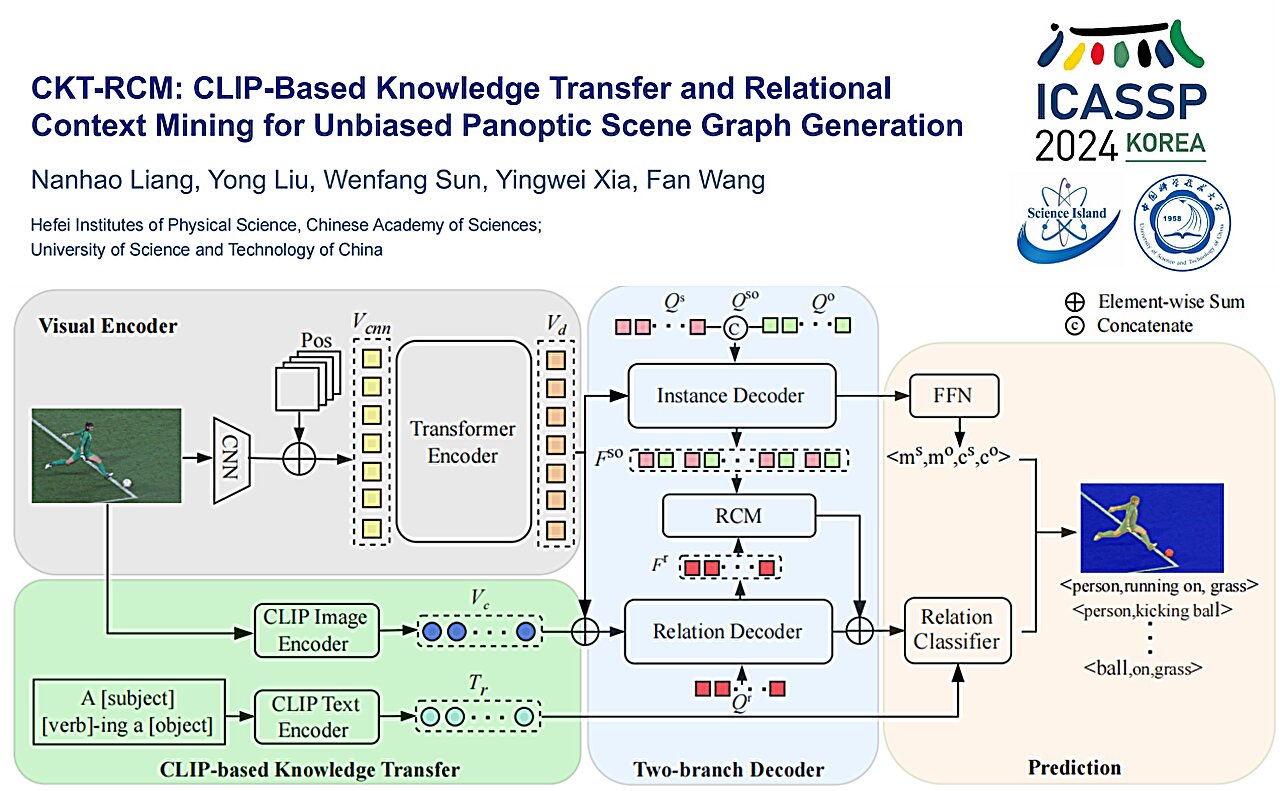
盖世汽车讯 据外媒报道,在中国科学院合肥物质科学研究院刘勇教授的带领下,研究人员提出新框架,即基于视频片段的知识转移和关系上下文挖掘(Clip-based Knowledge Transfer and Relational Context Mining,CKT-RCM),以解决计算机视觉中的长尾分布问题。
图片来源:中科院
全景场景图(PSG)是场景图生成中的一个突出研究方向,需要图像中所有关系的全面输出以及目标定位的精确分割。PSG旨在通过计算机视觉模型提高对场景的理解,并支持场景描述和视觉推理等下游任务。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202405/15I70392336C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921