盖世汽车讯 据外媒报道,位于意大利巴勒莫的国家研究委员会生物物理研究所(IBF-CNR)的HBP研究人员通过模仿大脑海马体的神经元结构和连接,开发出行机器人平台,能够像人类一样学习,同时能够进行导航。
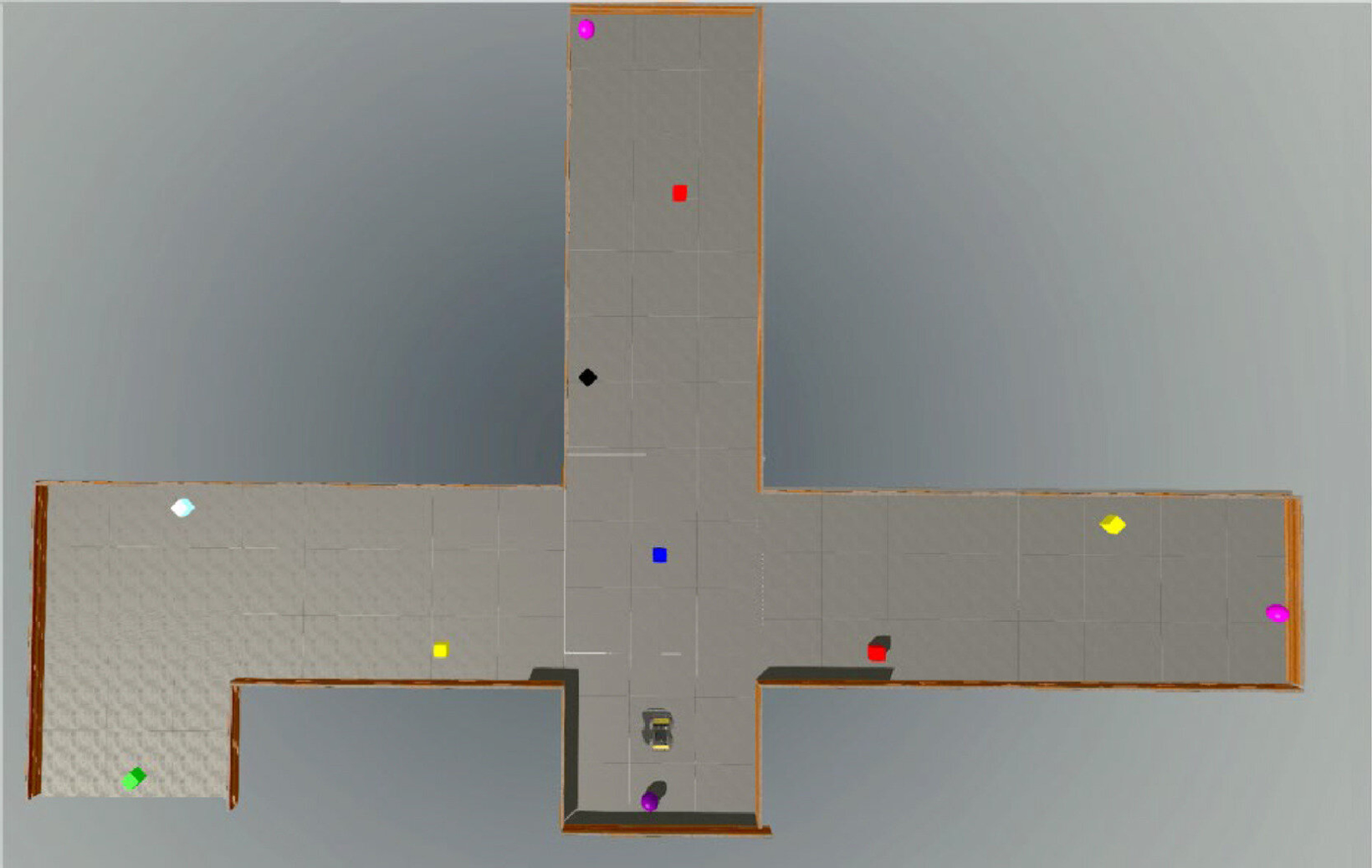
图片来源:Networks
模拟海马体能够在移动类似汽车的虚拟机器人时改变自身的突触连接。至关重要的是,这意味着它只需要导航到特定目的地一次就可以记住路径。而目前的自动驾驶导航方法主要依赖深度学习,必须计算数千条可能的路径。与之相比,模拟海马体显著取得进步。
相关论文以发表于期刊《Networks》。IBF-CNR的联合发表人Michele Migliore和Simone Coppolino表示:“目前,有很多导航系统可以模拟海马体的作用,以充当大脑的工作记忆。然而,这是我们首次不仅能够模仿海马体的作用,还能模仿海马体的结构,甚至单个神经元及其连接。”
“通过使用海马体的基本构建块,以及文献中已知的特征,例如为物体、特定连接和突触可塑性编码的神经元,我们构建出仿人类海马体。”从生物学中汲取灵感,研究人员能够使用与深度学习驱动平台不同的导航规则集。
为了到达指定的目的地,深度学习系统会计算地图上的可能路径,并分配成本,最终选择花费最少的路径。深度学习系统需要反复试验,并经过大量计算,才可以真正做到有效。而且,数十年来,众多研究一直致力于减少该系统的工作量。
研究人员解释说:“相反,我们的系统将其计算基于它可以通过摄像头主动看到的内容。在T形走廊中导航时,它会检查关键地标(在本例中为彩色立方体)的相对位置。一开始是随机移动,但一旦能够到达目的地,它会重建一个地图,将神经元重新排列到它的模拟海马体中,并将它们分配给地标。该系统只需要经过一次训练就能记住如何到达目的地。”
这更类似于人类和动物的移动方式。例如,当参观博物馆时,参展者首先在这个地方四处游荡,但如果需要返回到一个特定的展览,她会立即记住所有需要的步骤。机器人平台和海马体仿真都首先通过数字研究基础设施EBRAINS实现,然后允许研究人员在真实走廊中构建和测试物理机器人。
物体识别基于机器人摄像头的视觉输入,但理论上可以根据声音、气味或运动进行校准:重要的部分是受生物学启发的导航规则集,可以轻松适应多种环境和输入。
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/news/202304/18I70338197C101.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921