

近日,理想汽车表示,在理想L9和理想L8交付后,更强的辅助驾驶能力深受车主们的喜爱,随着使用里程的不断增加,产品团队也收到了用户们关于辅助驾驶领域的各类提问,今天理想选出最具有代表性的五个问题做一轮集中解答。
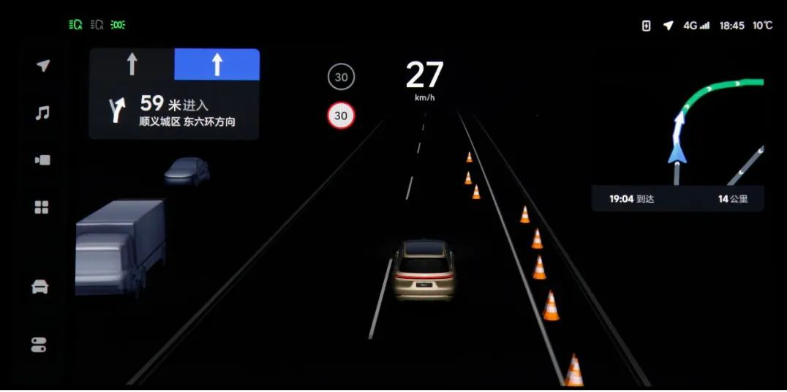
Q:我的车辆识别到锥桶了,为什么车不能自己躲避?
A:“屏幕中显示识别的锥桶”与“识别到锥桶且可以自主对车辆控制”,对识别的精准度要求有数量级的差别,要车辆自主躲避对识别精准度的要求很高。
目前我们正在提升这部分的感知算法,后续(AD Max)会支持对锥桶场景的避让能力。
Q:目前高速上超过大货车,还是有压迫感,这个问题怎么解?
A:“货车避让能力”在OTA 4.2中会有较明显的提升。
对于避让货车的幅度,我们需要结合实际的场景来进行判断,比方说另一侧是否有车,是否在弯道中,OTA 4.2后会结合用户的反馈,再对细分场景做提升,让避让更拟人化。
Q:高速路上高精度地图经常会断开,这是为什么?
A:导航辅助驾驶依赖高精度地图的覆盖率,理想汽车使用的是行业内产品力最高的高德高精度地图,但由于高精度地图在量产使用中,相比导航地图,还处于一个行业初期的状态(理想ONE 2021款及理想L9/L8/L7都标配了导航辅助驾驶,理想汽车也是目前国内导航辅助驾驶用户量最高的车企,但从整体汽车行业来说,具备这项能力的车型还非常少)。
现阶段,高精度地图的更新频率是比不上实际中国道路的修路及改路频率的。一旦高精度地图的数据与现实世界产生差异,或置信度降低时,我们会让导航辅助驾驶降级到车道保持辅助功能,来确保场景的安全性。
后续我们会通过,加强视觉感知的实时处理能力,以及与高德合作提升高精度地图的准确率,来优化“断开”的体验。
Q:直线召唤启动时间长,还能优化么?
A:AD Max的直线召唤启动时间长,主要是因为车辆冷启动时,Orin-X的启动耗时较久,大约需要等待40秒左右。目前我们已经有优化策略,正在研发中,明年Q1会上线,大约会将直线召唤的启动时间降低到10秒以内。Q:使用NOA出现无效的自动变道超车,反而通行效率降低了,该怎么办?
A:其实NOA的【变道积极性】和【无效变道】,一直是我们在研发过程中,要保持平衡的两个维度。在辅助驾驶还不具备人类司机的感知和预测能力的前提下,这两个性能基本是相互对峙的。人类司机很多时候在视线被遮挡的情况下,避免无效变道其实靠得是经验和直觉。
后续我们会进一步提升感知距离,以及对周围车辆的预测能力,让【变道积极性】和【无效变道】达到更好的平衡,但无法完全避免【无效变道】。其实大家如果去观察人类司机在高速中的超车行为,也是会有【无效变道】的,不过人会很快地修正他的决策。
理想汽车会在将来很长的一段时间内,让算法向人去学习,迭代到更接近人的决策能力。
本文地址:https://auto.gasgoo.com/news/202211/28I70323125C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921


















