
盖世汽车讯 据外媒报道,德国乌尔姆大学(Ulm University)的研究人员近日开发出一个新框架,旨在实时识别车辆周围的潜在威胁,从而提高自动驾驶汽车在城市和高度动态的环境中的安全性。
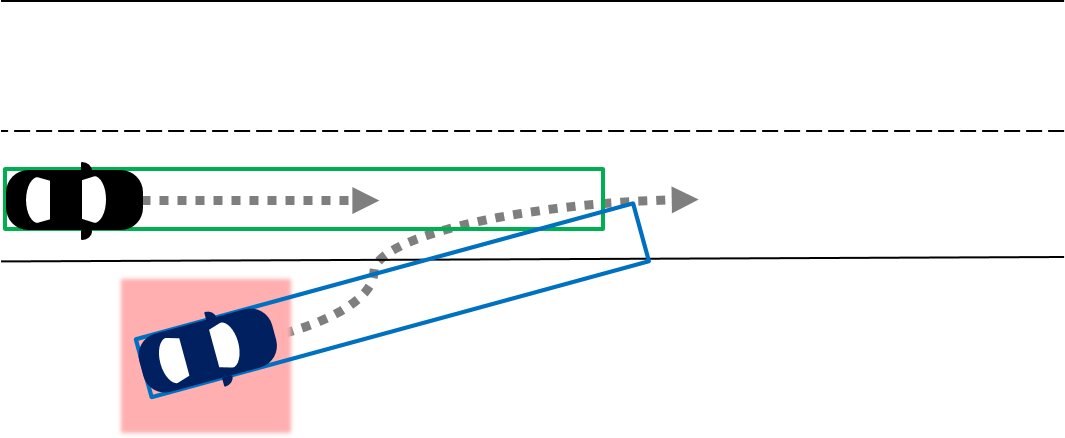
图片来源:Henning
研究人员之一Matti Henning表示:“我们研究的核心理念是将感知资源仅分配给与当前情况相关的自动驾驶汽车周围的区域,而不是简单的360°感知领域。这种方式可以节省计算资源,从而提高自动驾驶汽车的效率。”
当自动驾驶汽车的感知范围有限时,其安全性可能会大幅下降。例如,如果一辆车只认为其周围的特定区域是“相关的”,它可能无法检测到其他区域的潜在威胁物体。如果支持车辆功能的算法被编程为仅考虑和处理道路的特定区域,则可能会发生这种情况。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202207/27I70308756C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921















