盖世汽车讯 人类可能是全自动驾驶汽车进入城市街道的最大障碍之一。机器人必须能够预测附近驾驶员、骑自行车的人和行人的行为,才能在波士顿市中心安全地驾驶车辆。然而行为预测问题很难解决,当前的人工智能解决方案要么过于简单(可能假设行人总是走直线),要么过于保守(为了避开行人,机器人只是把车停在公园里),或者只能预测一个代理的下一步动作(道路通常同时承载许多用户。)
据外媒报道,麻省理工学院(MIT)的研究人员设计出一种看似简单的解决方案,通过将多智能体行为预测问题分解成更小的部分并单独处理每个部分,使得计算机可以实时解决这一复杂任务。
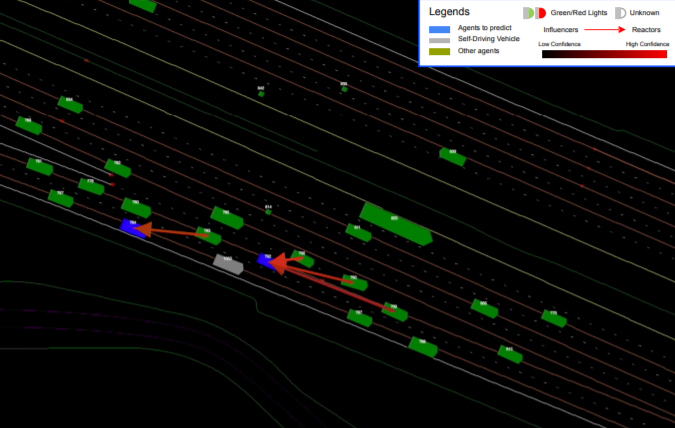
图片来源:arxiv
研究人员的行为预测框架首先会猜测两个道路使用者之间的关系,哪辆车、骑自行车的人或行人拥有通行权,以及哪个代理会让路,并使用这些关系来预测多个代理的未来轨迹。
研究的共同主要作者Xin "Cyrus" Huang表示:“将我们的模型与该领域的其他最先进模型比较,如Waymo的模型,我们的模型在这个具有挑战性的基准测试中取得了最佳性能。”
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202204/21I70298467C409.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921