1月25-26日,2018全球自动驾驶论坛在武汉·中国光谷举办,本次论坛以“启发创新·开放共享”为主题,会议期间,武汉光庭科技有限公司总经理苏晓聪发表了主题演讲,演讲内容如下:

武汉光庭科技有限公司总经理 苏晓聪
大家下午好,我是来自武汉光谷的企业,今天的主题是围绕智能网联汽车的关键技术和创新的实践,在这里给大家做一些分享。首先把公司的情况介绍一下,2002年,光谷成立了光庭公司的第一家公司。我们旗下有多家公司,有做硬件的、终端的、地图的、软件的。武汉基地有800人左右,主要围绕汽车做主要工作。业务方向,一是围绕汽车IT化做汽车的解决方案,软件服务、软件外包,目前主要是为国际的车厂合作。另外在地图领域做了很多工作,目前地图方面,高德、四维比较熟悉,我们也在做地图的工作。随着自动驾驶的到来,我们一直在开展智能驾驶高精度研发,目前研发方面有比较多的积累,去年9月份,成立武汉中海庭数据技术有限公司,上汽控股了这家公司。我们公司是一个典型的汽车行业公司,在整个研发、管理各方面都是按汽车行业的标准来做的,我们的软件是CMMI L5级,是华中唯一一个5级的公司,有地图的甲级资质。
业务布局方面,汽车电子是主要的业务范畴,技术延伸之后,做了很多智慧城市的运用。2013年做了战略性大调整,当时感觉到智能网联时代很快到来,当时把集团内的资源做了一次重整,2013年率先启动了智能网联时代的研发,结合智慧交通的理念做了新尝试。
智能网联汽车的业务主线,前端开发,结合客户的需求做了前瞻的技术,武汉产光谷制造的无人车超过20辆,在全国各地进行了部署和测试。在前端研发的基础上有示范的线路,昨天开发区的夏主任提到,武汉光谷全国首条智能驾驶示范线的开通是2016年4月份,这是我们和产业联盟共同推进的项目。前几年在做基础研发,从今年开始全面切入到产品层面,我们公司不缺技术,现在需要落地和运用。

公司做自主创新和前端研发的平台叫“光谷梦”,2013年在武汉成立了一个联盟,结合了产学研单位,在国内率先开展专注于智能驾驶的研发,国外、国内各地的车都有我们联盟做的技术和产品应用。日本日产在本国做实验,我们在里面提供了一些技术。下面包括东风、长安、比亚迪很多车上做的自动驾驶原型车的开发和实验。我们从2013年开始做,基本上每年一个迭代的版本,每年4月份、5月份在北京和上海车展发布最新技术,去年开始做产品的展示,2018年将推出新一代5.0的版本。这是“光谷梦”4.0的版本,大家在微信或者是腾讯视频,网上搜一下“光谷梦”自动驾驶或者是光庭自动驾驶,可以找到很多视频,每年我们有两到三段视频。这个二维码扫描可以看到有10分钟的测试,驾驶员用手机招车,车辆自动驶出、接人、自动行驶,整个过程是没有人工干预的,是城市路况的自动驾驶。
我们是做创新平台,这辆车上有多套机制,首先有面向L2的,我们主要是用毫米波雷达和定位来做,主要是在基本路况、城郊路况实现。这一块我们应该也有一定的积累,对视频如果大家感兴趣,也可以下载来观看。整个系统的结构,也是比较经典的结构,整个车辆模块划分,首先是感知,再是决策,再是控制、人机交互,车的几大核心板块,我们内部把它拆成了很多研究课题,这些课题有些是联盟的单位承接,有的是我们公司承接,有些是和客户一起来做。目前我们在这六个方向孵化了很多成果,包括一些产品和示范项目。
下面我重点讲一讲,在机制上能够有一定领先性的技术,在这里和大家分享一下。首先是高精度地图,地图是一种传感器,包括地图今后对自动驾驶的意义,我们叫安全驾驶地图。这些概念在国内提得非常早,原来都是做科普,从去年开始,越来越感到所有做自动驾驶的领域,都非常认可地图的关键意义。各种场景下,地图可以作为一种静态的能力,我们认为到L3、L4级别,地图必不可少,这样才能保证系统的安全性。通过这几年探索,在这个领域也积累了比较好的经验。
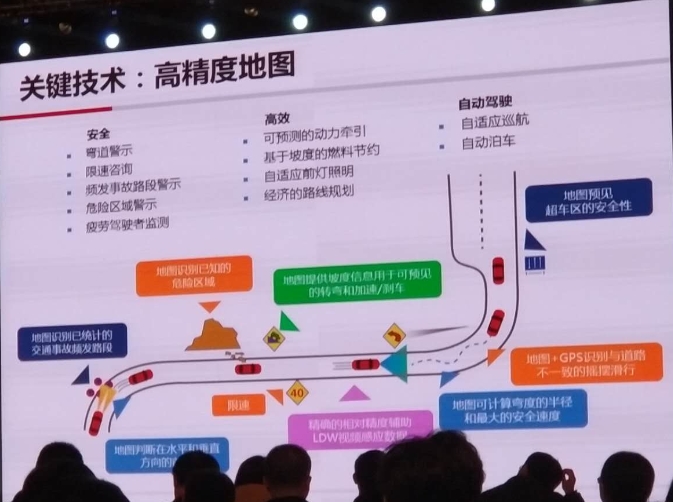
地图采集的成果和内容方面。高精度地图的概念大家应该比较清楚,传统的地图是给人用的,主要是用来语音播报,高精度地图是给车用的,精度也有不同等级的,根据运用不同,精度也不同。地图现在面临很多问题,特别是中国地图更新的问题,一旦把地图导入到自动驾驶的控制决策和环境感知里,地图的限时性非常关键。现在大家看到很多创业公司、IT公司在做基于大数据、人工智能,进行地图快速更新和升级工作,这一块我相信地图行业所有的人都在做,但是从我们在这个行业这么多年的实践来看,挑战是非常大的,这个路线一定是行得通的,但是路程会非常漫长,特别是精度、质量能够满足车的要求,路程还非常长。目前这个行业一定是传统做图的方式,再加上地图更新,才能把这个产业按步骤地导入到产业运用里去。
有了地图,第二个核心的方向是定位,这一块我们认为对地图而言,越来越多的人认识到定位的重要性。定位不仅是瞬时精度,一定是稳定的实时精度,我们国家在宣传定位的高成本方案,汽车行业运用的一定是低成本的系统,我们做了好几代技术,包括基于图象,结合激光雷达等等。在这方面,最近两年再结合基础设施的改进,我们认为可能未来两三年在产业上会有重大突破,这也是我们重点在攻克的方向。
另外是视觉的技术,这是任何做智能驾驶的领域绕不过去的,不管你是做环境感知、数据后处理,还是做测试验证,各方面都离不开摄象头和图象。这方面我们重点也做了布局,目前我们在做一体相机的产品,现在到了闭样的阶段,今年后续会为客户送样。立体相机和单目相机不一样,它是服务于自动驾驶的传感器。最近大家提的比较热的是AD-ECU,智能驾驶光有算法,光有平台是不行的,一定要有载体,作为汽车行业而言,不是简单地一台电脑,一台开发板,或者是几台开发板拼接起来就可以,一定要考虑安全性和功耗。这个系统非常复杂,比我们做一台电脑复杂千倍,我们和合作伙伴正在开发,今年2季度会把一些成果率先地和一些主要的合作伙伴使用起来。我们也是希望武汉造、光谷造这样的核心技术,在未来2019年、2020年,国内汽车量产的产品看到研发产品能够装进去,而不是运用的海外的东西。以上是我们探讨的认为有心得和优势的方向。

我们有了这样一些技术以后,一方面给我们的客户进行产品导入和开发,同时在光谷也做了大量实践,在光谷开通了“小鱼畅行”光谷直达号的运营,起点是从光谷广场,前1/3的路程是在城市的复杂路情。武汉的交通状况非常复杂,这一段路没有实现无人驾驶,是人工驾驶,另外1/3是三环线,是一段高速公路,这一段可以做自动驾驶,在上面跑的速度是60-70之间,最后一段是城郊路况,在高新大道6、7公里,虽然不是封闭的,但是路况行人比较少,非机动车比较少,马路也比较宽,这一段也可以做自动驾驶。这样一个规划,我们当时做了精心设计,希望这样典型的设计能够满足日常测试的需求,得到了光谷管委会的大力支持,政府给了我们一个批文,在国内率先进行了尝试。现在这一条线已在实际运营,大家可以下载一个“小鱼畅行”的APP,在上面可以约车,可以看到每天排的班次。现在这条线路的开通,为什么要做这个事情?首先要把它作为一个创新平台,一些合作伙伴在这个项目上提供一些技术支持。
从2016年到现在测试数据有20几万公里,搭载的人次有3万多,普通市民通过APP就可以预约然后坐这个车,载普通市民时是不开启自动驾驶功能的,法规不允许。但是我们会定期举办媒体体验日和市民体验日,就会把自动驾驶打开,但是平时载客是关掉的。这个项目目前为止,最大的收获是迈出了第一步。我们收集了大量实验数据,对系统改造做了基础工作。这一块如果大家感兴趣,可以在平台上做对接。
我们企业成长于武汉光谷,这十几年来,我们自认为是汽车人,但是跨了IT的界。我现在最大的感触是,做得越深,越感觉到系统的复杂度和落地的难度,需要严谨细致的工作非常多,我们现在从2017年开始做布局,2018年、2019年、2020年会做产品落地的事情,前路非常漫长,后续还需要和专家、同行朋友多交流、合作共赢,谢谢大家!
提示:“本文根据发言整理,未经嘉宾审核!” 如需转载或引用,请联系徐先生(021-39197820)
针对本次会议,盖世汽车进行全程直播,欲了解更多详情可关注以下专题链接:
PC端:http://auto.gasgoo.com/NewsTopic/70.html
移动端:http://m.gasgoo.com/news/topic/70
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/News/2018/01/26052358235870033224C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921













