盖世汽车讯 据外媒报道,美国陆军研究实验室的一组研究人员揭示了人脑如何处理明亮光和对比光,这对于提高机器人感知能力、让自动驾驶代理与人类合作非常关键。

(图片来源:美国陆军研究实验室)
研究人员表示,目前军队的首要任务是实现自动驾驶技术,为此,机器传感技术需要能够适应不断变化的环境。美国陆军作战能力发展司令部陆军研究实验室的研究员Andre Harrison表示:“当我们研发机器视觉算法时,在一个色调映射的过程中,真实世界的图像通常会被压缩到一个较窄的范围内,就跟手机摄像头一样。这可能导致机器视觉算法非常脆弱,因为其会基于与我们在现实世界中看到的模式不太匹配的人工图像打造。”
Harrison表示,通过研发一个具有10万分之一显示能力的系统,该团队发现大脑在更真实情况下的计算能力,从而可以在传感器中建立生物性弹性。
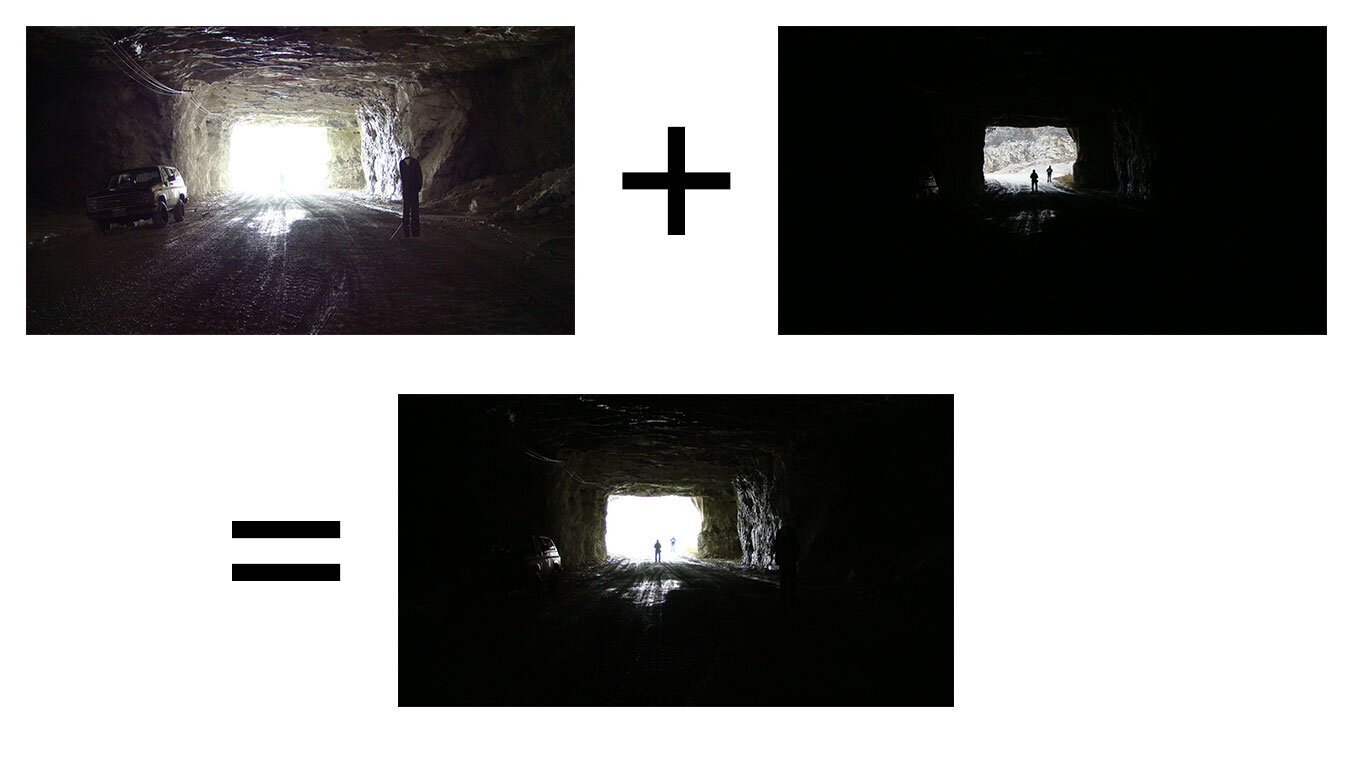
目前的视觉算法都基于利用计算机监视器研究人类和动物而打造,此类监视器的亮度范围有限,只有100比1(最亮与最暗像素对比)。而在现实世界中,亮度范围可能是10万比1,即高动态范围(HDR)。
研究人员表示:“光线的变化会对军队系统造成巨大挑战,例如当有风吹过树叶时,在森林中飞行的无人机可能会被光反射率的变化所迷惑;在崎岖地形行驶的自动驾驶汽车可能无法识别坑洞或其他障碍物,因为光线条件与其所接受训练的视觉算法略有不同。”
(图片来源:美国陆军研究实验室)
该研究团队寻求了解大脑如何自动从真实世界中输入10万比1的亮度范围,并将其压缩至更窄的范围,让人类能够解读形状。该团队研究了HDR的早期视觉处理,检查HDR亮度和边缘可如何简单互动,以此作为揭示潜在大脑机制的一种方式。
研究人员表示:“人脑有30多个视觉区,对于此类区域如何将眼睛看到的图像处理为可供理解的3D形状只有一个初步的认识。基于人类行为和头皮记录,我们的HDR亮度研究表明我们对如何弥合实验室和现实环境之间的差距知之甚少。但是,此类研究发现打破了我们的思维定式,表明我们之前从标准计算机监视器中获取的假设在现实世界中适用的能力有限,而且它们揭示了一些原则,可以引导我们的建模走向正确的机制。”
研究人员表示,在大脑视觉表征中,光线和对比度边缘如何互动的发现将有助于通过修正从2D信息中估计出3D形状时不可避免出现的畸形,改进在真实亮度下重建真实3D世界。
这一发现除了对自动驾驶汽车的视觉系统有利外,也有助于其他支持AI的设备的研发,如雷达和依赖于广泛动态范围感知的远程语音理解技术。
根据研究结果,研究人员正与学术界的合作伙伴一起开发计算模型,特别是配备尖峰神经元的计算模型,可能在HDR计算和更高效的视觉处理方面都具优势,而这两点对于低功率的无人机而言是比较重要的考虑因素。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202011/3I70214622C601.shtml
联系邮箱:info@gasgoo.com
客服QQ:531068497
求职应聘:021-39197800-8035
新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921
版权所有2011|未经授权禁止复制或建立镜像,否则将追究法律责任。
增值电信业务经营许可证 沪B2-2007118 沪ICP备07023350号