

(图片来源:马里兰大学)
盖世汽车讯 据外媒报道,美国马里兰大学(University of Maryland)一组计算机科学家采用了一种新型的计算机“记忆”,有望推动自动驾驶机器人和自动驾驶汽车技术发展,甚至推动整个人工智能的发展。
人类很自然地就学会如何将他们在世界上的位置与他们从世界上收集到的信息联系起来,并学习如何根据此类信息采取行动。例如,如果有人向另一个人扔球,而时间足够的话,人类可以学会衡量他们与球的关系,并举起手来接住球,该过程称为“主动感知”(active perception),可让人类根据感觉预测未来的动作。
人类的感觉系统和运动系统是统一的,意味着一个事件的记忆包含了此类信息的组合。另一方面,机器人和无人机等系统的摄像头和运动是独立的系统,有独立的数据流。如果能够将此类数据结合,机器人和无人机就能够创造自己的“记忆”,并能更有效地学习以模仿主动感知。
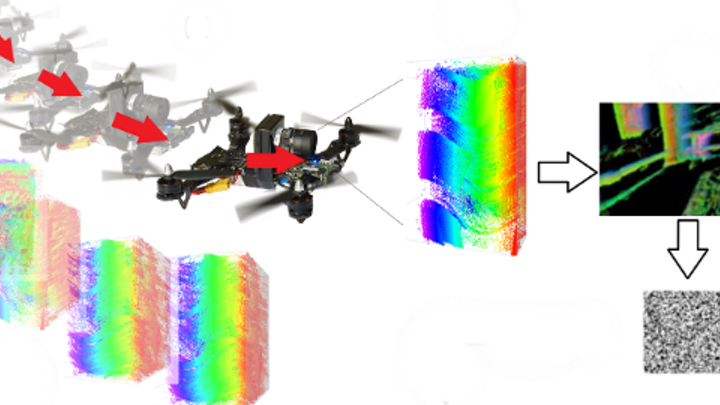
研究人员使用了iniLabs的DAVIS 240b DVS(动态视觉传感器)和高通公司的 Flight Proboard。DAVIS 240b DVS只会对场景中的变化做出反应,类似于人类眼睛中的神经元只在感受到光线变化时才会发出信号,而高通的 Flight Proboard安装在一个四轴无人机上。
使用一种称为多维二进制向量(HBV)的数据表现形式,无人机摄像头的信息和无人机速度信息被存储在相同的数据记录中。然后,卷积神经网络(CNN)只有DVS的视觉记录可作为参考,需要记住无人机采取的动作。卷积神经网络能够通过参考摄像头和速度数据结合产生的“记忆”,在所有的实验中,都能100%地准确完成任务。
相比于两个分开的数据流,该实验的原理是可以让机器视觉系统更快地参考事件和反应数据,在捕捉到特定的视觉数据时,可让机器人或自动驾驶汽车预测未来采取的动作,即基于输入的感知数据预测动作。或者,更简单地说,想象未来发生的事件,并提前思考好下一步动作。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/News/2019/06/240741284128I70108370C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921















