
盖世汽车讯 据外媒报道,法雷奥研发了一款端对端学习系统,用于车速控制。该系统采用了神经元网络及长短时记忆(long short-term memory,LSTM)功能,这是一种递归神经元网络(recurrent neural network,RNN),可学习长持续性(长期相依性,long-term dependencies)。
该款新系统由Wirbel及她同事研发,他(她)们还配置了一款人工神经元网络(artificial neural network,ANN),前者依赖于深度学习技术。该网络被提供了大量的人类驾驶员的车辆操作演示,该类演示由前视型摄像头录入,可驾驶员行驶时的视野情境密切相关。
该款神经元网络还将接受训练,模仿驾驶员的行为,尤其是将重心放在重现车辆当前的车速上。例如,当输入的图像含有50公里/小时的限速面板时,神经元网络将确保车辆的当前车速不会高于50公里/小时。

Wirbel解释道:“当前方有另一辆车时,人类驾驶员随之减缓车速,该神经元网络也会学习该类操作。研究人员试图使该神经元网络重现人类驾驶员的操作方式。该网络将接收前视型摄像头的信息,无需对感知作出解释说明,只是学习并重现驾驶员的相关操作行为。”
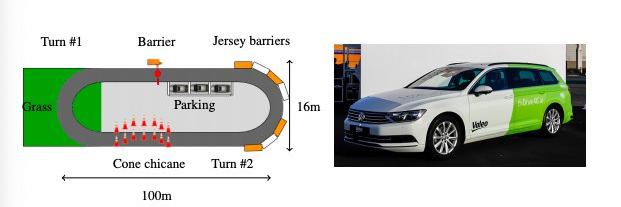
在完成神经元网络的训练后,Wirbel及其同事还将在仿真器的虚拟环境下开展测试,并将该神经元网络整合到真实的测试车辆中,在具有挑战性的赛道上行驶,评估其性能表现。他(她)们发现,该系统可高效地应对复杂的驾驶环境,在必要时控制车速。
该系统由Wirbel及她的同事设计,他(她)们取得了满意的效果,或许在不久后会将该款神经元网络系统配置到自动驾驶车辆中,提升车速控制的效率,实现更为直观的驾驶操控。研究人员计划将该概念验证应用到更为复杂的驾驶情境中,新增多种复杂的驾驶操控,如变道、十字路口转向或在环形交叉口(roundabouts)实现车辆的导航。
Wirbel补充道:“研究团队还将致力于该系统与当前自动驾驶车辆的可解释性与兼容性,为终端用户解释说明该神经元网络的对驾驶环境的感知能力及其驾驶决策的依据。未来的研究范围很广,目前致力于研究成果与当前各地区技术发展的同步性。该研究团队还将为法雷奥的其他部门提供专业知识,推动该款概念验证产生的量产进程。”(本文图片选自techxplore.com)
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/News/2019/01/130552585258I70083468C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921












