


盖世汽车讯 据外媒报道,欧洲inLane项目成功测试其样机的车道级路线规划导航应用,该项目在荷兰埃因霍温(Eindhoven)进行路测。
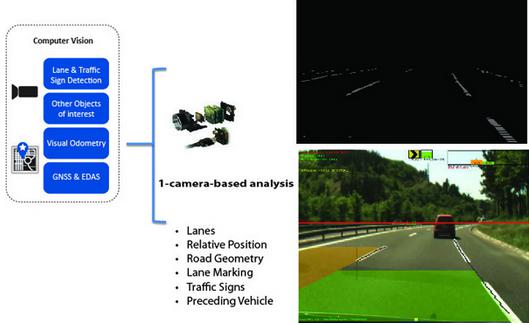
该项目获得了欧洲全球导航卫星系统(European Global Navigation Satellite System,EGNSS)的资金支持,inLane项目提议将伽利略人造卫星群(Galileo satellite constellation)的数据与计算机视觉技术相融合,提供新一代低成本、车道级高精度路线规划导航应用,这就需要基于众包的新一代增强版地图信息的辅助。
将车道信息发送到车载导航系统内,这就为驾驶员提供机会,由其挑选适用的车道,通过紧急变道操作,降低相关的风险。
当实现全面开发后,inLane系统将拥有多款应用,可供未来互联及自动驾驶车辆使用。该系统可提供自动驾驶车辆所需的定位精度,同时还利用车间通信及车辆对基础设施等数据交换,提升定位信息。
今年,inLane致力于重新定义及提升阿尔法样机(alpha prototype),整合部分功能及服务。于是,又创建了beta版的样机,并于今年11月底在荷兰埃因霍温进行路测。
现场测试旨在评估该系统的精度,重点关注绝对定位(absolute positioning)、道路建模(road modeling)、局部动态地图生成(local dynamic map generation)、地图升级及车道级导航。
该方法旨在评估用户体验,确保该设备适用于巴塞罗那的最终用户测试。然而,该测试结果将作为研发最终样品时的考量因素,在2018年6月将与终端用户进行测试。(本文图片选自traffictechnologytoday.com)
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/News/2017/12/2106015115170030125C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921












