

当前汽车市场的高阶自动驾驶、轻地图方案、BEV+数据智能趋势显著。2023年12月19日,在长城汽车2023技术研讨会上,智驾科技MAXIEYE创始人兼CEO分析了BEV智驾发展面临的痛点,提出了相应的解决方案,并介绍了MAXIPILOT®2.0及其产品案例。
最后,周圣砚表示,MAXIEYE希望能够实现AI驱动自动驾驶规模化和高阶化,与客户全维陪伴,共同成长。

周圣砚 | 智驾科技MAXIEYE创始人兼CEO
以下为演讲内容整理:
汽车市场新趋势
当前汽车市场呈现出诸多新趋势。第一个趋势是高阶自动驾驶。2022年行业在高速NOA方向竞争,2023年开始转向城市NOA,媒体和市场的聚焦点都在高阶上。事实上,2023年高速NOA产品在中国乘用车的2600万辆销量中仅占3%。第二个趋势是轻地图方案。BEV的出现让行业对于轻地图和高精度地图出现许多争议。新技术给市场带来了许多变化,同时也产生了很多机会。第三个趋势是BEV+数据智能。BEV重构了底层技术,未来的底层技术开发将由工程驱动转变为数据驱动。
我们将自动驾驶分为三类。第一类是L2,一体机产品。前些年,Mobileye创新性地将其带入市场,国内企业凭借价格更便宜,客户服务更好逐渐打开市场。一体机的市场装配率非常高,行业预计在2026年将实现AEB标配,一体机市场将从当前的40%提升到100%。
第二类是高速NOA,痛点在于技术没有收敛,定义没有收敛,导致产品的价值并不匹配其价格。此外,高速NOA应用场景较少,且目前方案基于传统的CNN框架,存在体验不够流畅、方案同质化较高的问题。受到广泛宣传影响,人们往往认为高速NOA已经发展得非常好了,实际上其体验还远远没达到消费者用得放心的程度。还有一个痛点在于,车厂在研发过程中将L2功能和高阶功能一分为二,在这个割裂的开发过程中车厂需要重复验证,如高速做好后,却发现供应商的基础功能尚未完成,因此又需要回过头来教供应商如何搞定AEB等,再做一次感知、目标筛选和识别,最终导致系统变得四不像,又需要重复与供应商沟通,不断进行投入。当下痛点在于L4的公司无法做AEB,做AEB的公司无法做L2+,相关企业一直做重复的工作。
基于此,我们提出了一些解决思路。做产品升级的最终目的都是让消费者直观感受到产品的变化,促进车厂销量提升。而智能驾驶和智能座舱是消费者能够感受到的最直观的内容。因此我们需要做的就是让消费者明显感受到变化,提升消费者体验。在产品升级和投入的过程中,我们需要进行选择,不能重复造轮子,比如L2在高速上的换道、汇合等功能完成后,其他基础功能完全可以沿用。这样的增量式开发能够大幅降低车辆投入,让智能驾驶投入可控。

图源:演讲嘉宾素材
针对L2,我们可以用BEV做一遍,让其在可控成本下,体验达到一定流畅度,比如在高速公路中未画线处可以流畅处理,而不是突然退出,让驾驶员处于危险状态中,从而提升产品竞争力。如果产品能够在直行过程中完全和自动驾驶一样,那么就能做到国外所未有的创新,做到直行无接管。
针对高速NOA,我们可以控制其功能和成本。以往从1R1V升级到高速NOA,成本上升了近两万元,但客户使用频次仅增加10%。我们希望做到只增加少量成本,通过使用BEV技术再次对高速NOA进行升级,迅速提升产品性价比和客户体验。
第三类是城区NOA。当前两件事情完成后,城区NOA就变得顺理成章。以底层的产品架构可升级性和可延续性为基础,增加传感器硬件即可实现。这个过程中,大部分底层数据是可复用的,数据智能、数据回传和训练的网络模型都可以复用。
高速进化的BEV智驾
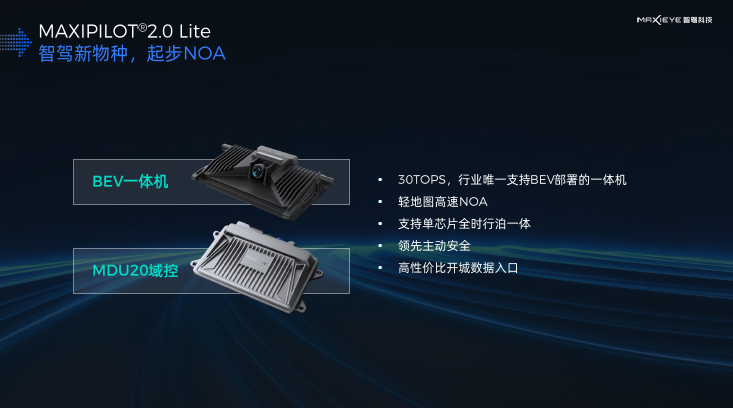
我们的产品有两种形态,首先,我们有行业内唯一支持BEV一体机的产品,因为我们希望能够把直行体验做得和完全自动驾驶一样。第二,我们有支持全时行泊一体的域控形态方案,且支持高速无图NOA。有图和无图的区别在于BEV是否可以感知到前方的道路拓扑,正如人开车时是无图的,但可以看到前方视野内的道路拓扑,目中无图而心中有图。这就是BEV一体机的特点,能够在直行过程中让驾驶员尽量少接管。
下图是Lite的详细架构,整个系统不需要向高精地图商买授权,所有东西都是无图的方案,BEV全部可以完成,还可以实现NOA,我们的目标就是每辆车起步即NOA。我们的愿景是无论是什么价位的车型,都能实现智能化,只是其程度有所不同。
图源:演讲嘉宾素材
我们之所以有信心能够达成让每一辆车起步即实现NOA的愿景,是基于三大要素。首先,我们的方案中整车架构是零改动的,投入最少。第二,BEV技术可以实现轻地图,成本最低。第三,我们大幅拓展了使用场景,实现加量不加价。价值增加而价格不变,会增加客户粘性,形成快速传播,最终促进销量提升。我们的产品比较简单,整个底层的BEV架构直接闭环到了城市NOA。
无图其实就是将前方拓扑全部解决。在生成拓扑的过程中,深度学习的第一位是道路拓扑。我们寻找了许多分叉、汇合的典型道路场景,让其进行学习,约有一百多种要素支持路径规划。
MAXIPILOT®2.0 Pro的算力为60TOPS,是单芯片自然散热,采用的是行泊合一方案,达到了极致的性价比。同时,该方案支持轻地图记忆行车,比入门级MAXIPILOT®2.0多了纯视觉占用网络,可以解决静止障碍物问题。MAXIPILOT®2.0 Pro还有高性价比的记忆地图共享功能,可以在城市下拓展体系。记忆地图不仅可以满足当下车型竞争力,还能够为将来开城做数据支撑。

图源:演讲嘉宾素材
MAXIPILOT®2.0 Pro产品具有诸多亮点,一是360°融合BEV,环视镜头复用。即车辆在道路上行驶过一次后,会进行记忆存储,之后行驶到这条道路上就可以进行记忆行车。实现了异构摄像头特征级融合,输出BEV空间目标,对比传统多V复杂标定/后处理,架构更高效。有效解决了遮挡目标的检测问题,不完整目标检测的准确率增加。此外,还构建了时序融合的4D空间,对抗俯仰颠簸,实现更精准的轨迹预测,端到端的网络模型减少对经验逻辑的依赖,可以真正实现数据驱动的自学习。
亮点二是升级占用空间网络,支持G-AEB。可以辅助驾驶员在城市道路工况下避免与一些一般障碍物碰撞,保护乘员安全,通过摄像头识别连排锥桶、水马、圆筒等,实现对施工区域的检测,系统基于高鲁棒性的施工区域检测实现提前预警与避让。
MAXIPILOT®2.0 MAX拓展了城区NOA,能够实现全场景自动驾驶。100 TOPS级别,支持跨芯片移植,拓展了轻地图城区NOA,通过复用2.0 Lite和2.0 Pro 积累的海量价值数据,实现成本可控、节奏可控的开城。
海市数据智能体系包括智能化标注、自动化校验、自动检查、数据生成、4D场景重建等,支持量产回传的信息和数据自动化标注,已经和诸多车厂的项目进行合作,开始实际运作。在此系统下,工程师除控制功能需要上车调试外,其他从开发测试到交付的工作都可以在家完成。
在规模化量产中,我们交出了较好的答卷。一是AEB误触发百万公里<1次;二是全系五星+主动安全;三是量产数据回传场景超过3亿公里;四是具备高阶智驾和主动安全复合型能力。之所以能交出如此好的答卷,得益于我们数据智能系统的积累和迭代。
最后,我们希望能够实现AI驱动自动驾驶规模化和高阶化,与客户全维陪伴,共同成长。
(以上内容来自智驾科技MAXIEYE创始人兼CEO周圣砚于2023年12月19日在长城汽车2023技术研讨会发表的《MAXIPILOT®2.0:高速进化的BEV智驾新物种》主题演讲。)
本文地址:https://auto.gasgoo.com/news/202401/16I70379258C106.shtml
联系邮箱:info@gasgoo.com
客服QQ:531068497
求职应聘:021-39197800-8035
新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921
版权所有2011|未经授权禁止复制或建立镜像,否则将追究法律责任。
增值电信业务经营许可证 沪B2-2007118 沪ICP备07023350号


















