


盖世汽车讯 据外媒报道,美国麻省理工学院(Massachusetts Institute of Technology,MIT)计算机科学与人工智能实验室(Computer Science and Artificial Intelligence Laboratory,CSAIL)正在制定“双向控制法(bilateral control)”,利用自适应巡航控制系统,未来或将消除“幽灵堵车(phantom traffic jams)”。
据CSAIL团队透露,目前关注交通流量问题的学术论文有上百篇,但鲜有谈及实际解决方案。有人曾提出一项建议,借助车载电子设备,实现车辆的互联,协调彼此间的距离。然而,该方法需要非常细化的协调配合,还需要为互联车辆打造大型网络。相较之下,CSAIL团队的方法就简单得多,只需安装新款软硬件,对车辆实现升级即可。此外,部分硬件设备的价格也并不昂贵。
幽灵堵车是看似没有任何起因的堵塞,无事故或停顿车辆,也没有封闭施工的车道,道路却会莫名其妙地突然出现堵塞,很长一段时间过后,车流又会毫无征兆的顺畅起来。
这种堵车发生的原因是当车流比较饱和的时候,大家都匀速前进的状态是非常不稳定的。只要有一点儿扰动,前方的司机变道或者踩一脚刹车,就会立即造成后方车辆依次做出连锁反应,然后形成一个虚拟的堵车点,这个堵车点会堆积大量汽车,然后逐渐蔓延到很远的后方。
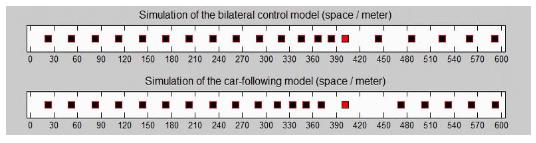
MIT对研究旨在解决“幽灵堵车”问题。该团队最近发布的研究指出,只需确保车辆间的前后车距相等即可,该技术或将使驾驶员的行进速度快上一倍。CSAIL团队将该方法称为“双向控制法”,但他们建议车企升级自适应巡航控制系统,并在车辆的前后保险杠增设传感器,为车辆提供等距的前后车距。

据该团队透露,若配置上述设备的车辆占比较高,那么效果会更为显著。该项目获得了丰田的资金支持,未来其计划开展情境模拟,测试该方法是否不仅提升了驾驶员的行车速度,还提升安全性。该研究团队负责人Berthold Horn教授是提出“双向控制”理念提出者,他于2013年提出该理念。
他表示:“若采用该方法,或许将大幅缩短行程所耗费的时间及燃油经济性,且无需增设道路或对基础设施进行改变。团队的研究表明,若驾驶员始终能确保车辆的前后车距相等,会大幅减轻驾驶员的焦虑程度,不会因此而造成交通拥堵。”(本文图片选自traffictechnologytoday.com)
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/News/2017/12/1905012212270030011C601.shtml
好文章,需要你的鼓励
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921














