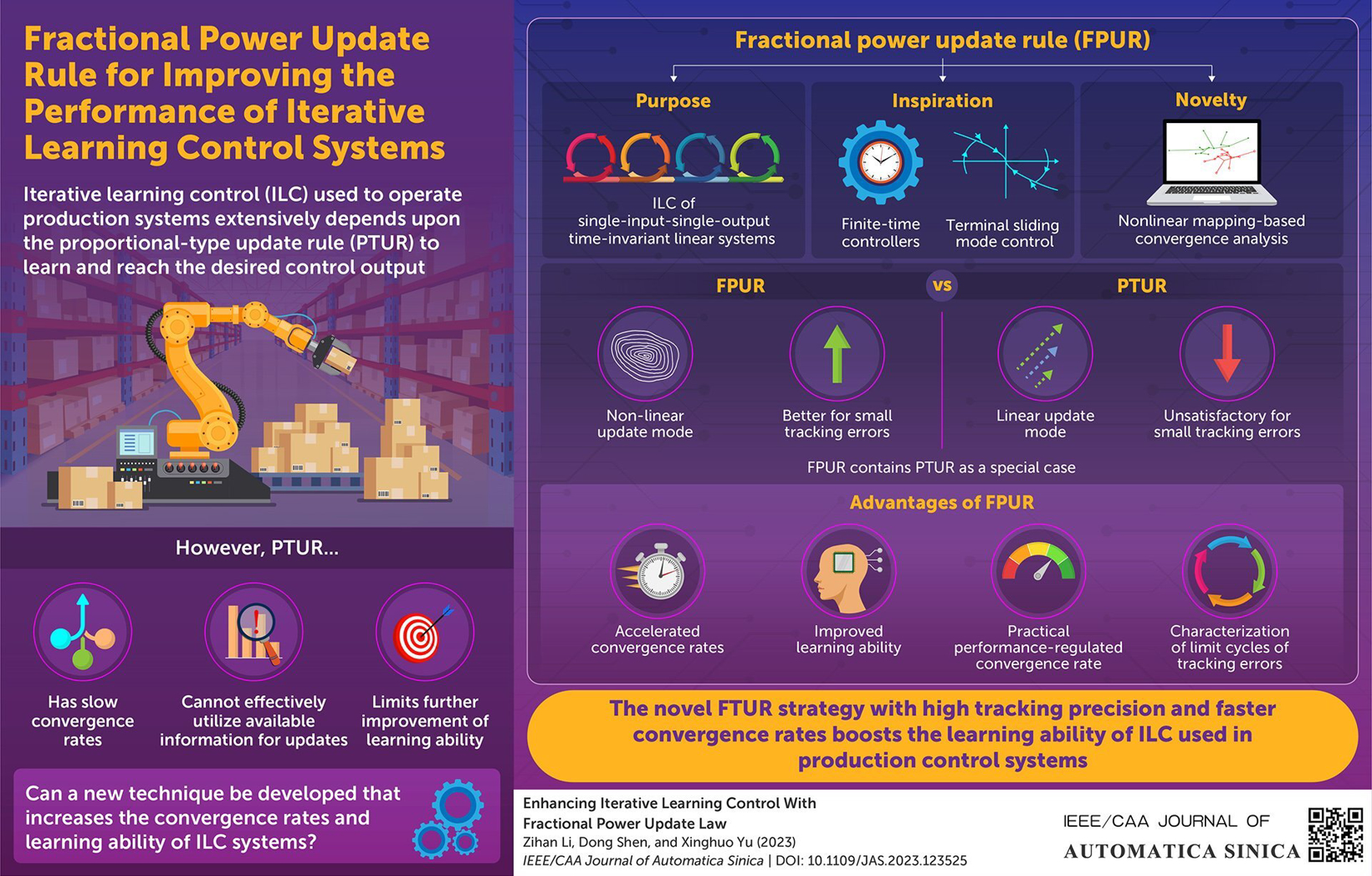
盖世汽车讯 从过去的错误中吸取教训,不仅人类会这样,计算机也是。在工业中,该过程主要通过帮助操作生产系统的基于计算机的控制系统完成。对于批量执行特定任务的工业机器人,例如生产服装、计算机芯片或烘焙食品,最常用的控制技术是迭代学习控制(ILC)。大多数行业仍然依赖使用比例型更新规则(proportional-type update rule,PTUR)的学习策略的ILC系统。该技术通过一遍又一遍地重复相同的任务,并根据先前迭代中遇到的错误更新其控制输入来提高ILC系统的性能。
然而,这种控制方法已经是几十年前提出的。由于ILC系统越来越多地被用于执行更复杂的任务,因此需要能够更快、更准确地学习的技术。
据外媒报道,科学家推出一种新技术,使用分数幂更新规则(FPUR)来增强单输入单输出线性ILC系统的性能潜力。该研究已发表在期刊《IEEE/CAA Journal of Automatica Sinica》。
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202306/7I70344479C409.shtml
联系邮箱:info@gasgoo.com
求职应聘:021-39197800-8035
简历投递:zhaopin@gasgoo.com
客服微信:gasgoo12 (豆豆)

新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921