盖世汽车讯 虽然现在许多汽车公司都在投资开发自动驾驶汽车,但迄今为止,自动驾驶车辆还尚未达到大规模部署所需的安全水平。若要达到该水平,车辆需要能够安全有效地应对道路上的各种挑战。
据外媒报道,卡内基梅隆大学(Carnegie Mellon University)的研究人员开发出基于强化学习(RL)的框架,可以帮助提高自动驾驶汽车在匝道合并场景中的性能,即匝道上的车辆偏离主干道的情况,或将提高自动驾驶汽车的安全性,降低事故风险。
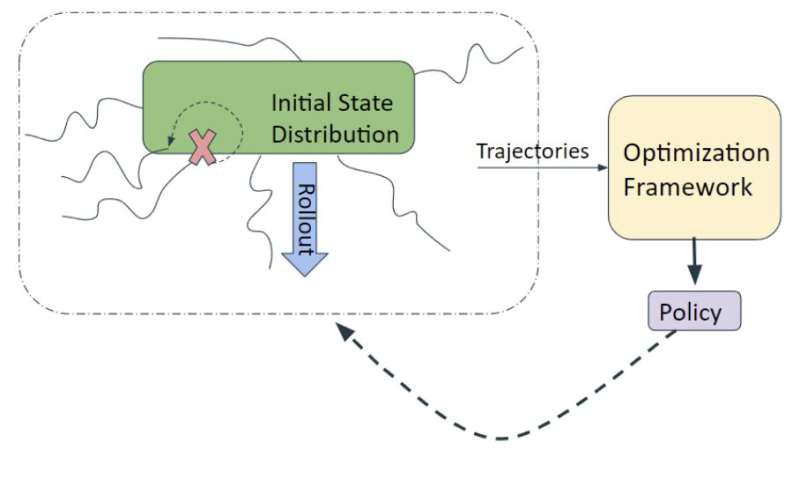
图片来源:arXiv
开发该模型的研究人员之一Soumith Udatha表示:“此次研究关注的是高速公路并道,因为涉及高速车辆、不同风格的驾驶员以及各种不确定性。”
Udatha及其同事致力于提高自动驾驶汽车的安全性。在最近的论文中,这些研究人员尝试设计出一个框架,可以有效地捕捉匝道合并场景,并根据对任何不确定性和可能风险的分析来规划车辆的行动。
Udatha解释说:“RL模型与环境交互并收集数据以优化它们的奖励,但这种数据探索在部署到现实环境中时会遇到一些问题,部分原因是并非代理遇到的所有状态都是安全的。我们用控制屏障功能(CBF)来约束我们的RL策略,以确保在指定距离内的安全。因此,在环境约束下,我们可以忽略不安全状态,并增强系统学习导航的能力。”
CBF是一类相当新的计算方法,旨在增强自动驾驶系统的安全控制。CBF可以直接应用于不同的优化问题,包括斜坡合并。但CBF执行的优化并没有考虑系统在探索环境时收集的数据,而RL方法可以帮助填补这一空白。
Udatha表示:“我们发现,我们的算法可以扩展到离线和在线RL环境。由于我们现在拥有大量用于离线RL的数据,因此对离线数据集的训练最终可以产生更好的模型。根据我们的指标,我们还发现将概率CBF作为约束包含在内可以提供更好的安全性,因为CBF在一定程度上考虑了驾驶员的不确定性。”
Udatha及其同事在一系列测试中测试了他们的框架,使用的是由英特尔实验室(Intel Labs)和巴塞罗那计算机视觉中心(Computer Vision Center)的研究人员开发的在线版CARLA仿真器。在这些仿真中,基于RL的框架成果显著,凸显了其在匝道合并期间提高自动驾驶车辆安全性的可能价值。
Udatha补充道:“我们现在计划通过训练模型来扩展研究,以在驾驶员不确定的场景中将自动驾驶汽车与多辆汽车合并。我们还发现目前缺少用于比较各种匝道合并方法的标准基准,因此我们正在同时尝试为NGSIM建立匝道合并基准,其中,NGSIM是NHTSA在美国I-80和101高速公路上发布的高速公路数据集。”
*版权声明:本文为盖世汽车原创文章,如欲转载请遵守 转载说明 相关规定。违反转载说明者,盖世汽车将依法追究其法律责任!
本文地址:https://auto.gasgoo.com/news/202212/26I70326189C101.shtml
联系邮箱:info@gasgoo.com
客服QQ:531068497
求职应聘:021-39197800-8035
新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921
版权所有2011|未经授权禁止复制或建立镜像,否则将追究法律责任。
增值电信业务经营许可证 沪B2-2007118 沪ICP备07023350号