
盖世汽车讯 据外媒报道,加州大学圣地亚哥分校(University of California San Diego)的电气工程师开发了一种方法提高现有雷达传感器的成像能力,可以使其准确预测场景中物体的形状和大小。新系统在夜间和大雾天气测试时表现良好。
(图片来源:加州大学圣地亚哥分校)
恶劣的天气会给自动驾驶汽车带来挑战。自动驾驶汽车依靠像激光雷达和雷达等技术来观察周围环境,并进行导航,但每种技术都有其缺点。在晴朗的天气条件下,激光雷达可以绘制高分辨率3D图像,但在雾、尘、雨或雪等环境中却无法看清周围环境。而雷达虽然不受天气影响,但却只能捕捉部分道路图像。
加州大学圣地亚哥分校教授Dinesh Bharadia解释道,“这是一种类似激光雷达的雷达,能以较低的成本,使自动驾驶汽车在恶劣天气条件下也能感知周围环境。我们的技术还可以实现激光雷达和雷达的融合,无需使用昂贵的激光雷达。”
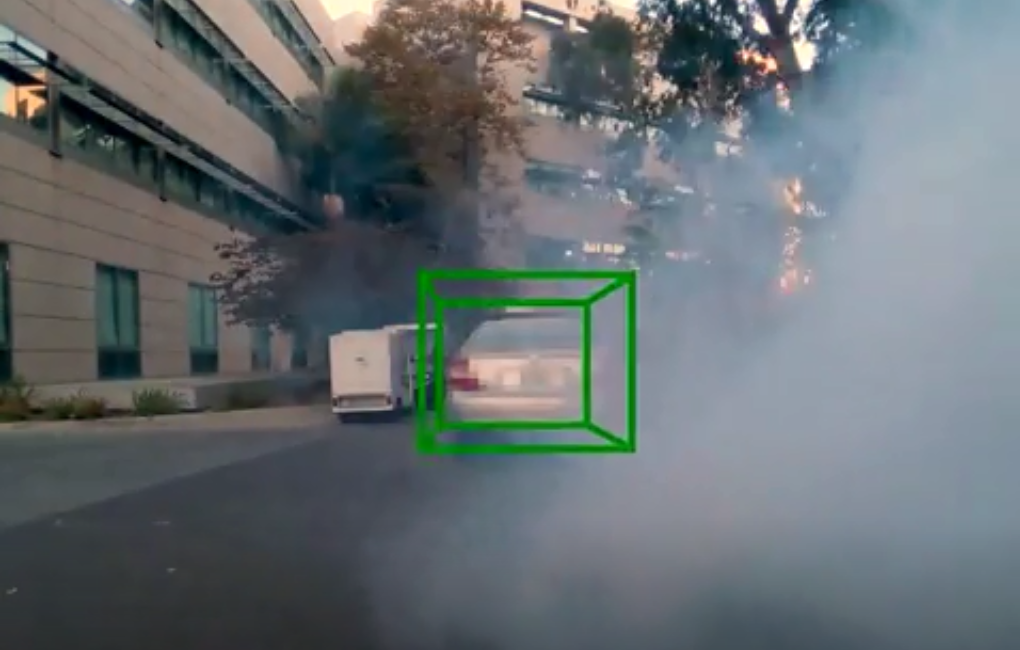
该系统由装置在发动机罩上的两个雷达传感器组成,其平均间距为普通汽车的宽度(1.5米)。相较于单一的雷达传感器,以此种方式布置两个雷达传感器能使系统看到更多的空间和细节。在晴朗的昼夜进行测试驾驶时,在确定移动车辆的轮廓方面,该系统的性能与激光雷达传感器相当。而且在模拟大雾天气的试验中,其性能也没有变化。该团队使用烟雾器,使另一辆汽车隐藏起来,该系统仍能精确地预测该车辆的3D几何形状,而激光雷达传感器却没有通过测试。
雷达成像质量较差的原因在于,当无线电波从物体上反射时,只有一小部分信号会反射回传感器,因此,车辆、行人和其他物体以稀疏的点集形式出现。加州大学圣地亚哥分校计算机科学和工程博士Kshitiz Bansal表示,“这就是使用单一雷达进行成像所面临的问题。由于单个雷达只接收到几个点来代表场景,因此感知能力较差,就需要采用多雷达装置,通过增加反射点的数量来提升感知能力。”研究小组发现,将两个雷达传感器间隔1.5米装置在汽车引擎盖上是最优方案。Bansal称,“以此种方式安装两个雷达可以创建高分辨率区域,从而提高物体检测性能。”
此外,该系统还克服了雷达的另一个缺点:噪点。在雷达图像中经常会出现不属于任何物体的随机点,传感器会接收到这些回波信号,即不是直接来自被探测物体的无线电波反射信号。Bharadia指出,更多的雷达意味着更多的噪点。因此,该团队开发了一种新算法,可以将来自两个不同雷达传感器的信息融合在一起,生成无噪点的新图像。
同时,该团队还构建了一个数据集,融合了来自两个雷达的数据。Bharadia表示,“目前还没有包含此类数据的公开数据集,这些数据来自多个雷达的重叠视场。我们收集自己的数据,建立自己的数据集,用于训练算法和测试。”
该数据集由54000帧在白天和夜晚拍摄到的雷达图像组成,包含实时交通和模拟的雾天驾驶场景。未来,研究人员将在雨天收集更多的数据,为此,该团队需要为其硬件打造更好的防护罩。目前,该团队正与丰田公司合作,将新的雷达技术与摄像头结合起来。研究人员表示,此种技术有可能取代激光雷达。Bharadia表示,“仅依靠雷达,我们无法感知车辆颜色或型号,而这些特征对于提高自动驾驶汽车的感知能力也很重要。”
*特别声明:本文为技术类文章,禁止转载或大篇幅摘录!违规转载,法律必究。
本文地址:https://auto.gasgoo.com/news/202011/19I70229673LC601.shtml
联系邮箱:info@gasgoo.com
客服QQ:531068497
求职应聘:021-39197800-8035
新闻热线:021-39586122
商务合作:021-39586681
市场合作:021-39197800-8032
研究院项目咨询:021-39197921
版权所有2011|未经授权禁止复制或建立镜像,否则将追究法律责任。
增值电信业务经营许可证 沪B2-2007118 沪ICP备07023350号














